Manoonpong Poramate, Geng Tao, Kulvicius Tomas, Porr Bernd, Wörgötter Florentin
Bernstein Center for Computational Neuroscience, University of Göttingen, Göttingen, Germany.
PLoS Comput Biol. 2007 Jul;3(7):e134. doi: 10.1371/journal.pcbi.0030134.
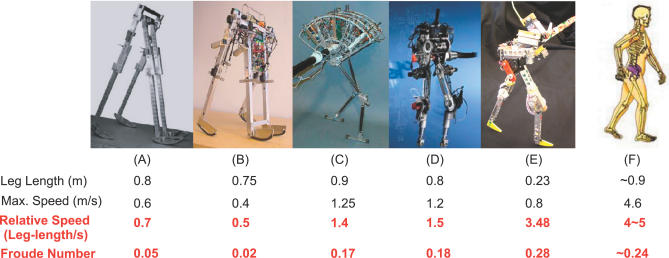
Human walking is a dynamic, partly self-stabilizing process relying on the interaction of the biomechanical design with its neuronal control. The coordination of this process is a very difficult problem, and it has been suggested that it involves a hierarchy of levels, where the lower ones, e.g., interactions between muscles and the spinal cord, are largely autonomous, and where higher level control (e.g., cortical) arises only pointwise, as needed. This requires an architecture of several nested, sensori-motor loops where the walking process provides feedback signals to the walker's sensory systems, which can be used to coordinate its movements. To complicate the situation, at a maximal walking speed of more than four leg-lengths per second, the cycle period available to coordinate all these loops is rather short. In this study we present a planar biped robot, which uses the design principle of nested loops to combine the self-stabilizing properties of its biomechanical design with several levels of neuronal control. Specifically, we show how to adapt control by including online learning mechanisms based on simulated synaptic plasticity. This robot can walk with a high speed (>3.0 leg length/s), self-adapting to minor disturbances, and reacting in a robust way to abruptly induced gait changes. At the same time, it can learn walking on different terrains, requiring only few learning experiences. This study shows that the tight coupling of physical with neuronal control, guided by sensory feedback from the walking pattern itself, combined with synaptic learning may be a way forward to better understand and solve coordination problems in other complex motor tasks.
人类行走是一个动态的、部分自我稳定的过程,依赖于生物力学设计与其神经控制之间的相互作用。这个过程的协调是一个非常困难的问题,有人提出它涉及多个层次,其中较低层次,例如肌肉与脊髓之间的相互作用,在很大程度上是自主的,而较高层次的控制(例如皮层控制)仅在需要时逐点出现。这需要一个由几个嵌套的感觉运动回路组成的架构,其中行走过程向步行者的感觉系统提供反馈信号,这些信号可用于协调其运动。使情况更加复杂的是,在每秒超过四个腿长的最大行走速度下,可用于协调所有这些回路的周期相当短。在本研究中,我们展示了一个平面双足机器人,它使用嵌套回路的设计原理,将其生物力学设计的自我稳定特性与多个层次的神经控制相结合。具体来说,我们展示了如何通过纳入基于模拟突触可塑性的在线学习机制来调整控制。这个机器人能够以高速(>3.0腿长/秒)行走,自我适应微小干扰,并以稳健的方式对突然引起的步态变化做出反应。同时,它可以在不同地形上学习行走,只需要很少的学习经验。这项研究表明,由行走模式本身的感觉反馈引导的物理控制与神经控制的紧密耦合,再加上突触学习,可能是更好地理解和解决其他复杂运动任务中协调问题的一条途径。