White Nathan, Roddey Cooper, Shankaranarayanan Ajit, Han Eric, Rettmann Dan, Santos Juan, Kuperman Josh, Dale Anders
Department of Cognitive Science, University of California, San Diego, La Jolla, California 92037, USA.
Magn Reson Med. 2010 Jan;63(1):91-105. doi: 10.1002/mrm.22176.
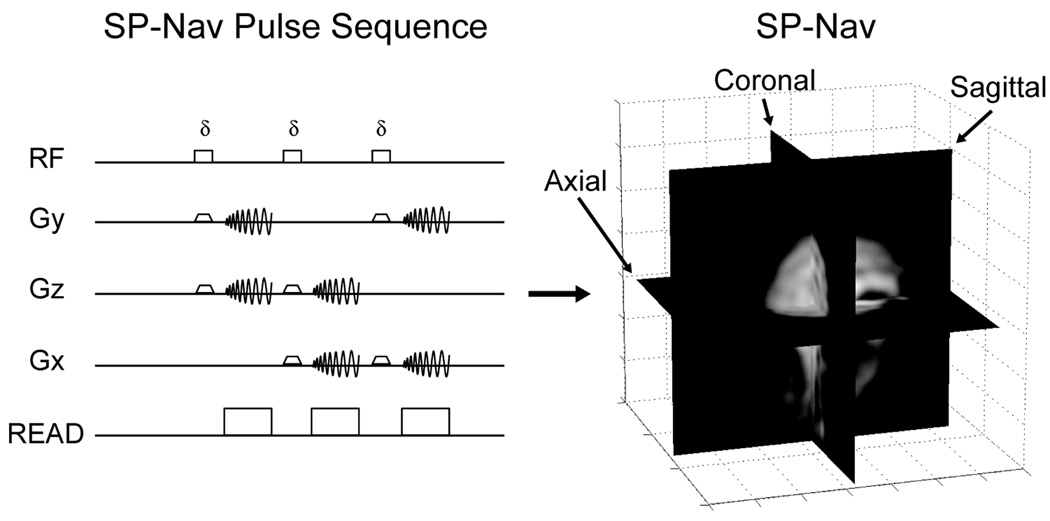
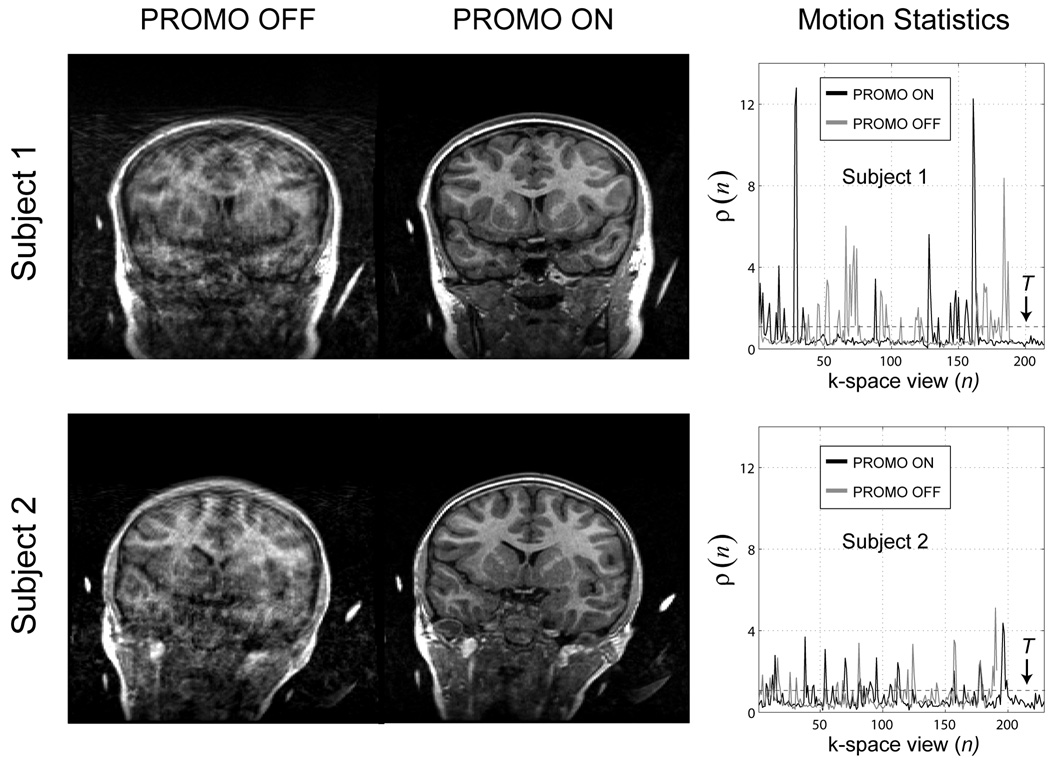
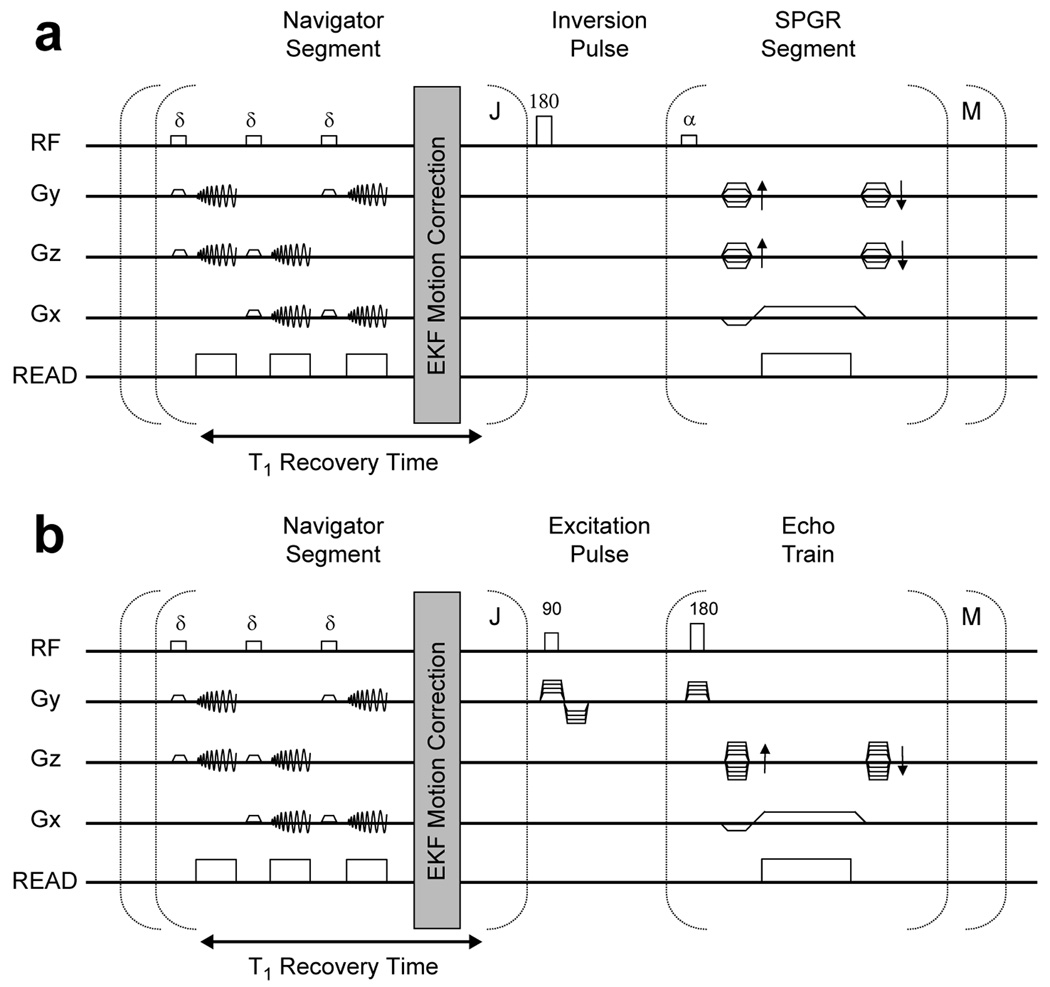
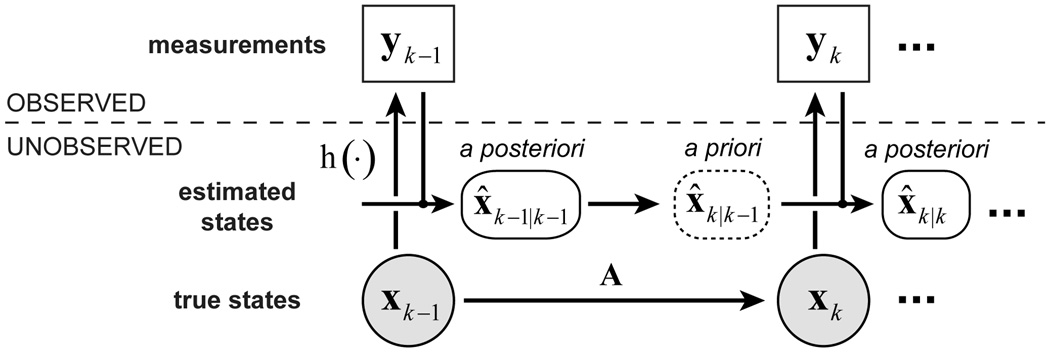
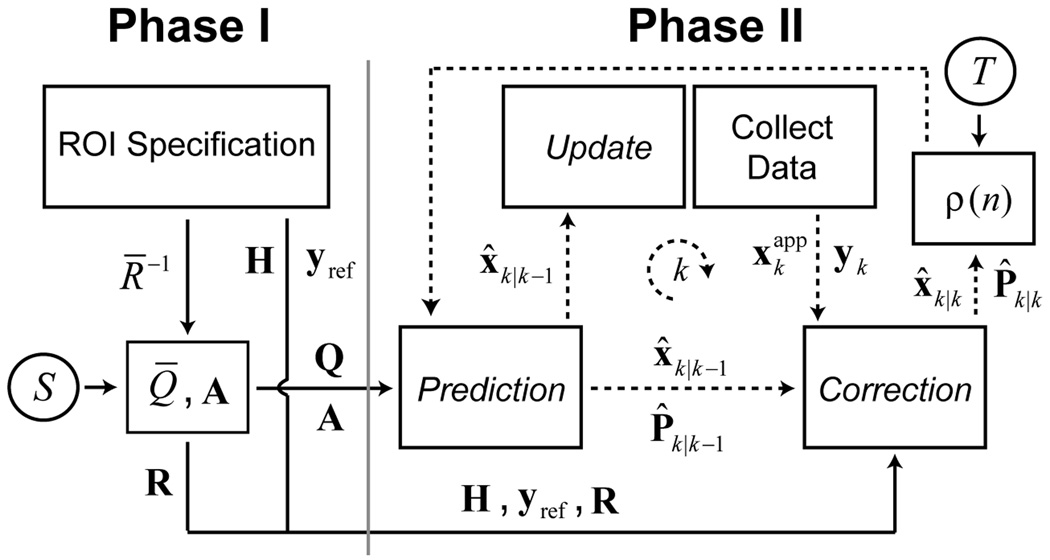
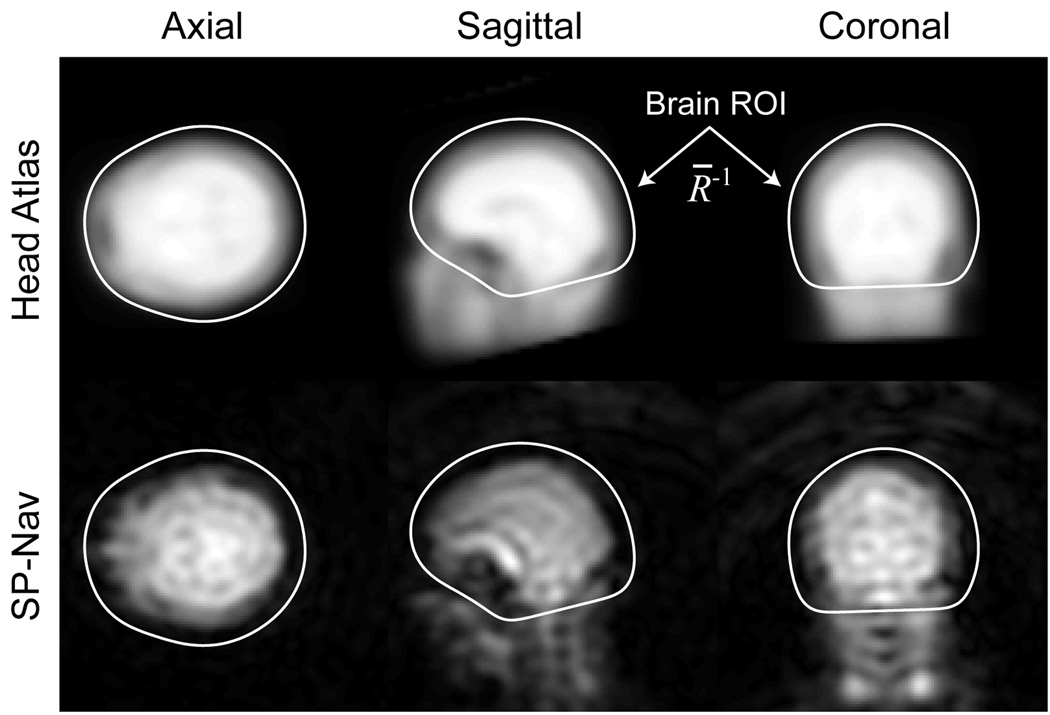
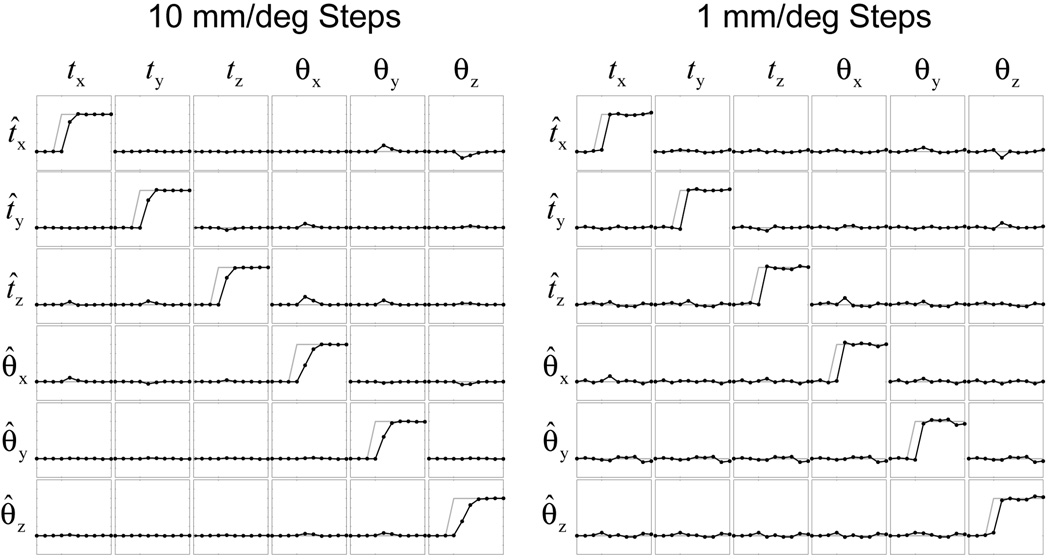
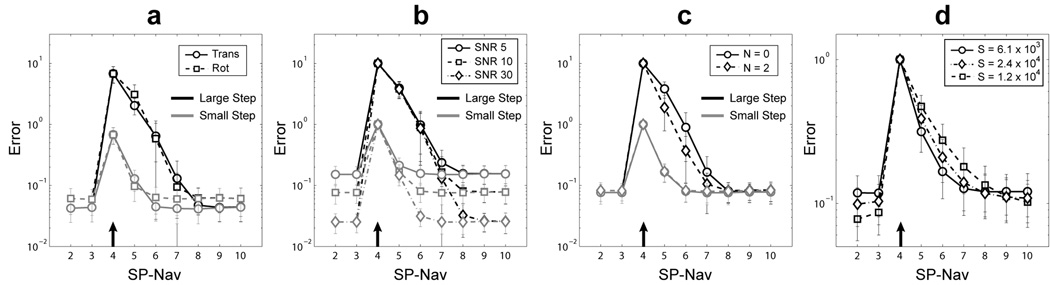
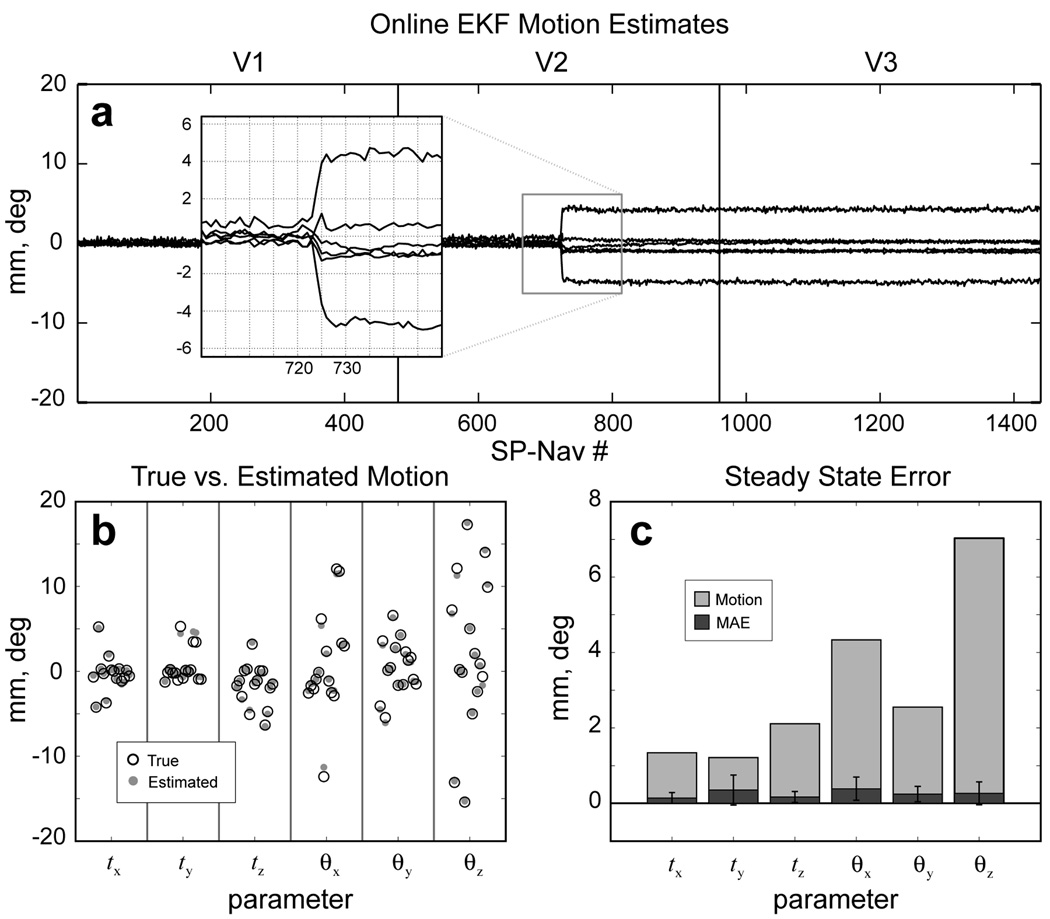
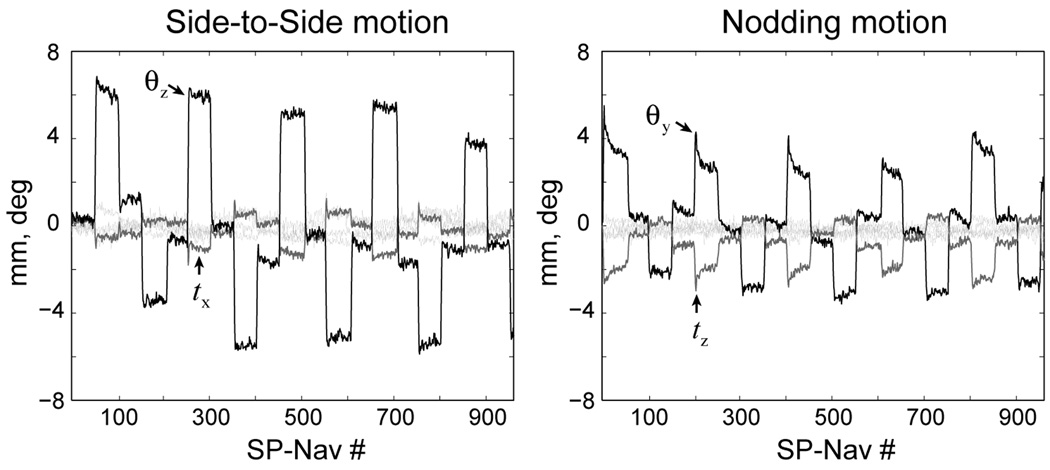
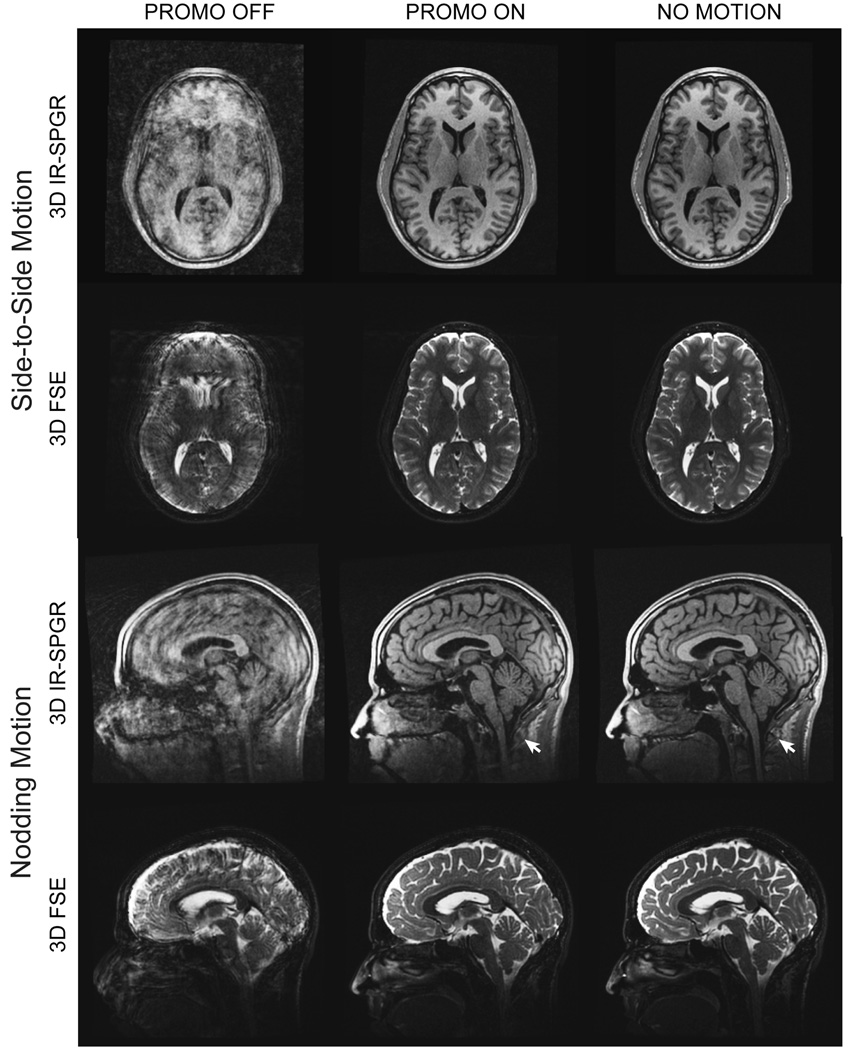
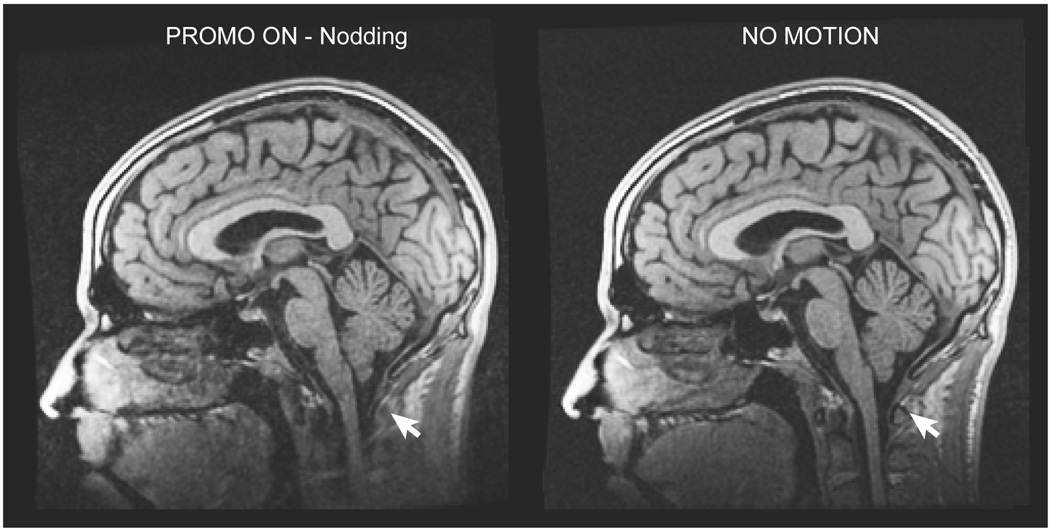
Artifacts caused by patient motion during scanning remain a serious problem in most MRI applications. The prospective motion correction technique attempts to address this problem at its source by keeping the measurement coordinate system fixed with respect to the patient throughout the entire scan process. In this study, a new image-based approach for prospective motion correction is described, which utilizes three orthogonal two-dimensional spiral navigator acquisitions, along with a flexible image-based tracking method based on the extended Kalman filter algorithm for online motion measurement. The spiral navigator/extended Kalman filter framework offers the advantages of image-domain tracking within patient-specific regions-of-interest and reduced sensitivity to off-resonance-induced corruption of rigid-body motion estimates. The performance of the method was tested using offline computer simulations and online in vivo head motion experiments. In vivo validation results covering a broad range of staged head motions indicate a steady-state error of less than 10% of the motion magnitude, even for large compound motions that included rotations over 15 deg. A preliminary in vivo application in three-dimensional inversion recovery spoiled gradient echo (IR-SPGR) and three-dimensional fast spin echo (FSE) sequences demonstrates the effectiveness of the spiral navigator/extended Kalman filter framework for correcting three-dimensional rigid-body head motion artifacts prospectively in high-resolution three-dimensional MRI scans.
在大多数MRI应用中,扫描过程中患者运动引起的伪影仍然是一个严重问题。前瞻性运动校正技术试图从源头上解决这个问题,即在整个扫描过程中保持测量坐标系相对于患者固定。在本研究中,描述了一种基于图像的前瞻性运动校正新方法,该方法利用三个正交的二维螺旋导航采集,以及基于扩展卡尔曼滤波算法的灵活的基于图像的跟踪方法进行在线运动测量。螺旋导航器/扩展卡尔曼滤波器框架具有在患者特定感兴趣区域内进行图像域跟踪的优点,并且对失谐引起的刚体运动估计的损坏敏感度降低。该方法的性能通过离线计算机模拟和在线体内头部运动实验进行了测试。涵盖广泛阶段头部运动的体内验证结果表明,即使对于包括超过15度旋转的大型复合运动,稳态误差也小于运动幅度的10%。在三维反转恢复扰相梯度回波(IR-SPGR)和三维快速自旋回波(FSE)序列中的初步体内应用证明了螺旋导航器/扩展卡尔曼滤波器框架在高分辨率三维MRI扫描中前瞻性校正三维刚体头部运动伪影的有效性。