He ZeFang, Zhao Long
Science and Technology on Aircraft Control Laboratory, Beihang University, Beijing 100191, China ; Digital Navigation Center, Beihang University, Beijing 100191, China.
ScientificWorldJournal. 2014;2014:280180. doi: 10.1155/2014/280180. Epub 2014 Dec 29.
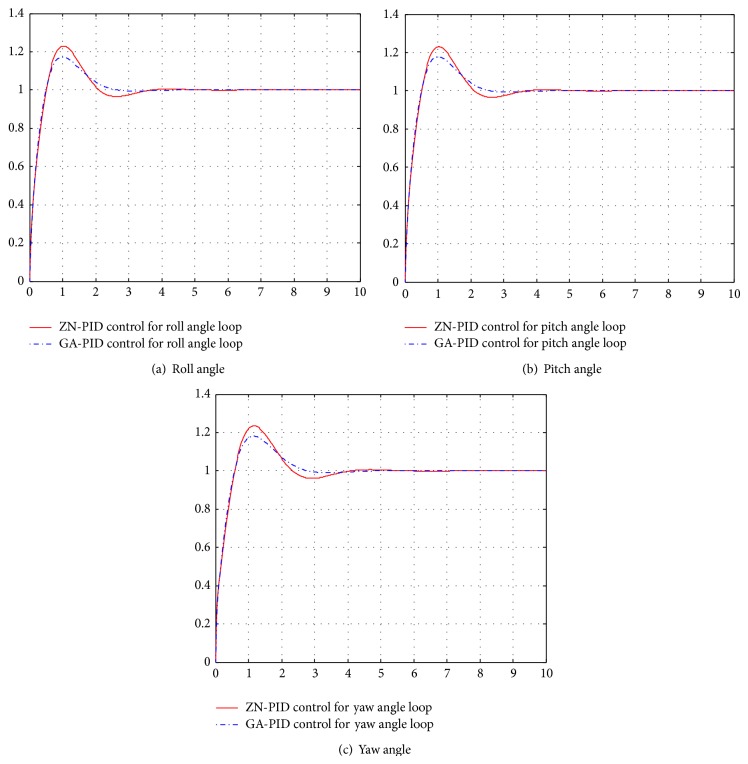
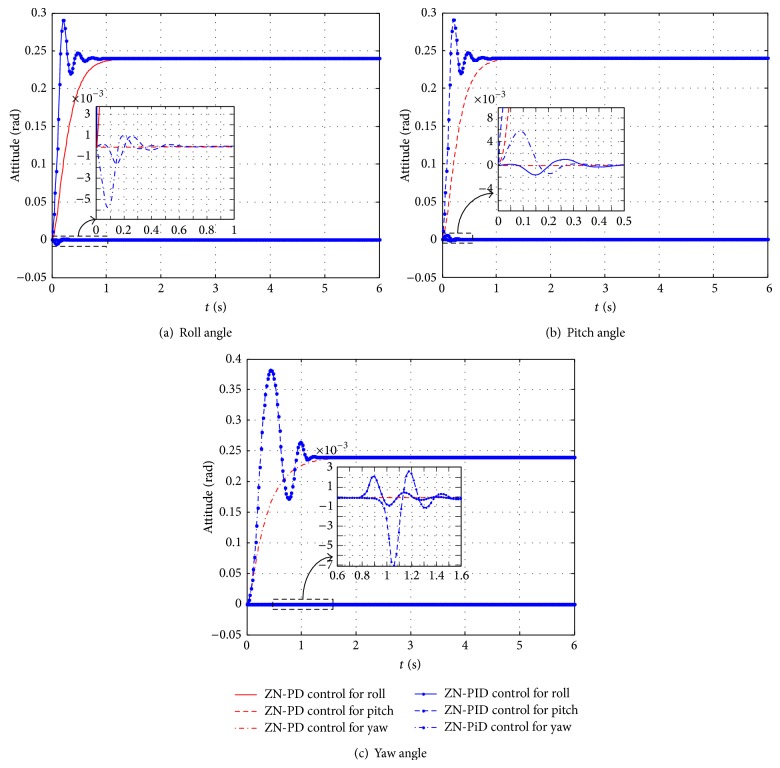
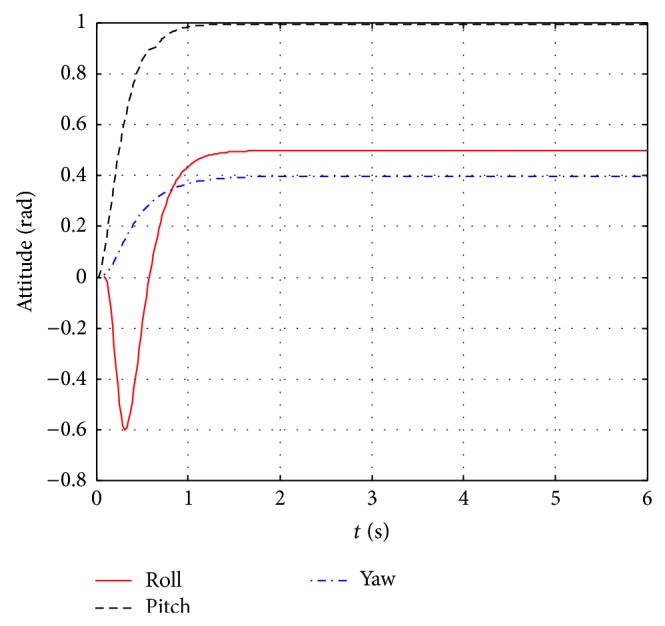
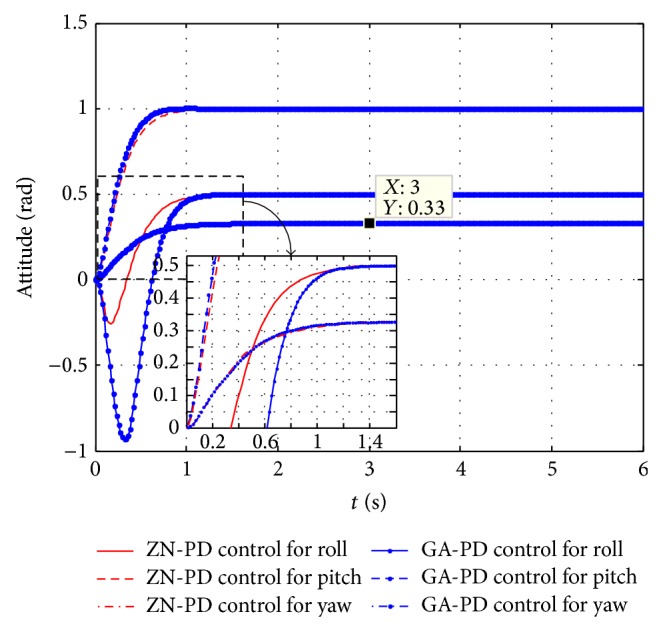
An attitude control strategy based on Ziegler-Nichols rules for tuning PD (proportional-derivative) parameters of quadrotor helicopters is presented to solve the problem that quadrotor tends to be instable. This problem is caused by the narrow definition domain of attitude angles of quadrotor helicopters. The proposed controller is nonlinear and consists of a linear part and a nonlinear part. The linear part is a PD controller with PD parameters tuned by Ziegler-Nichols rules and acts on the quadrotor decoupled linear system after feedback linearization; the nonlinear part is a feedback linearization item which converts a nonlinear system into a linear system. It can be seen from the simulation results that the attitude controller proposed in this paper is highly robust, and its control effect is better than the other two nonlinear controllers. The nonlinear parts of the other two nonlinear controllers are the same as the attitude controller proposed in this paper. The linear part involves a PID (proportional-integral-derivative) controller with the PID controller parameters tuned by Ziegler-Nichols rules and a PD controller with the PD controller parameters tuned by GA (genetic algorithms). Moreover, this attitude controller is simple and easy to implement.
针对四旋翼直升机姿态角定义域狭窄导致其易于不稳定的问题,提出了一种基于齐格勒 - 尼科尔斯规则来整定四旋翼直升机比例 - 微分(PD)参数的姿态控制策略。所提出的控制器是非线性的,由线性部分和非线性部分组成。线性部分是一个通过齐格勒 - 尼科尔斯规则整定PD参数的PD控制器,作用于反馈线性化后的四旋翼解耦线性系统;非线性部分是一个将非线性系统转换为线性系统的反馈线性化项。从仿真结果可以看出,本文提出的姿态控制器具有很高的鲁棒性,其控制效果优于另外两种非线性控制器。另外两种非线性控制器的非线性部分与本文提出的姿态控制器相同。线性部分涉及一个通过齐格勒 - 尼科尔斯规则整定PID控制器参数的比例 - 积分 - 微分(PID)控制器和一个通过遗传算法(GA)整定PD控制器参数的PD控制器。此外,这种姿态控制器简单且易于实现。