Madrigal Carlos A, Branch John W, Restrepo Alejandro, Mery Domingo
Departamento de Ingeniería Electrónica, Instituto Tecnológico Metropolitano, Medellín 050013, Colombia.
Facultad de Minas, Universidad Nacional de Colombia, Medellín 050041, Colombia.
Sensors (Basel). 2017 Oct 2;17(10):2262. doi: 10.3390/s17102262.
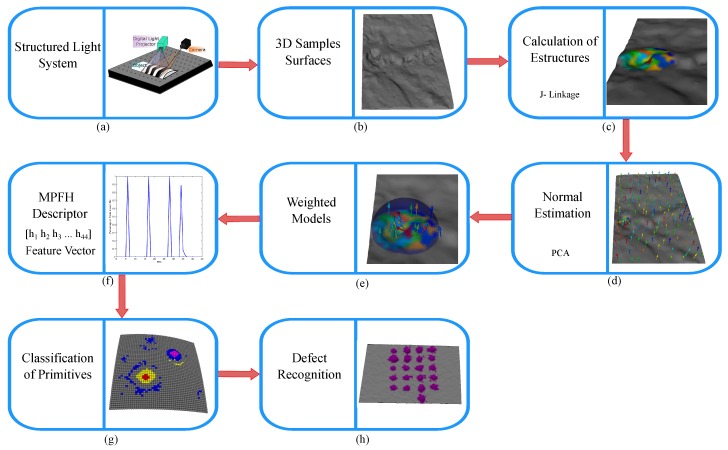
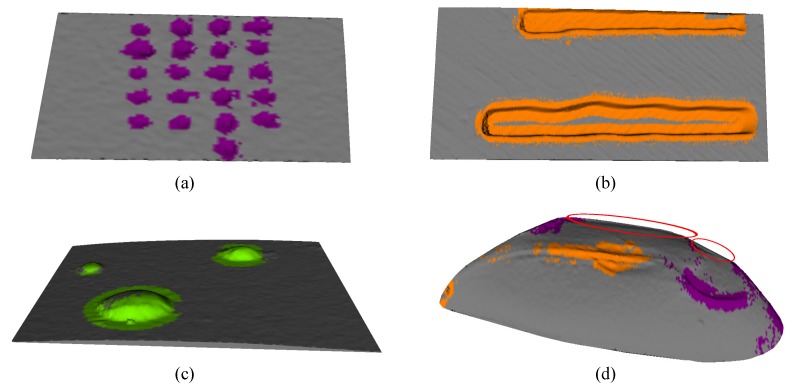
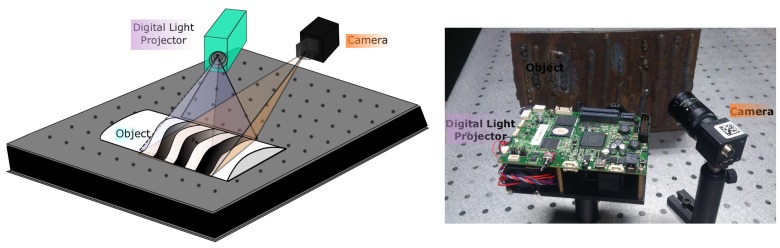
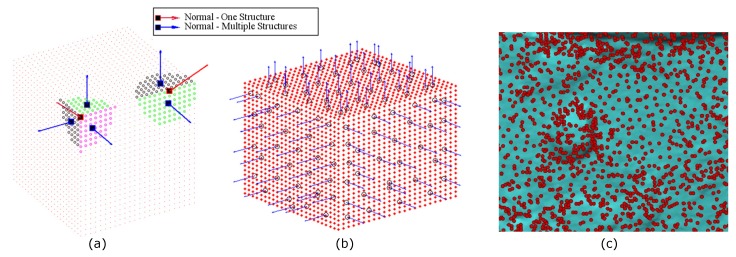
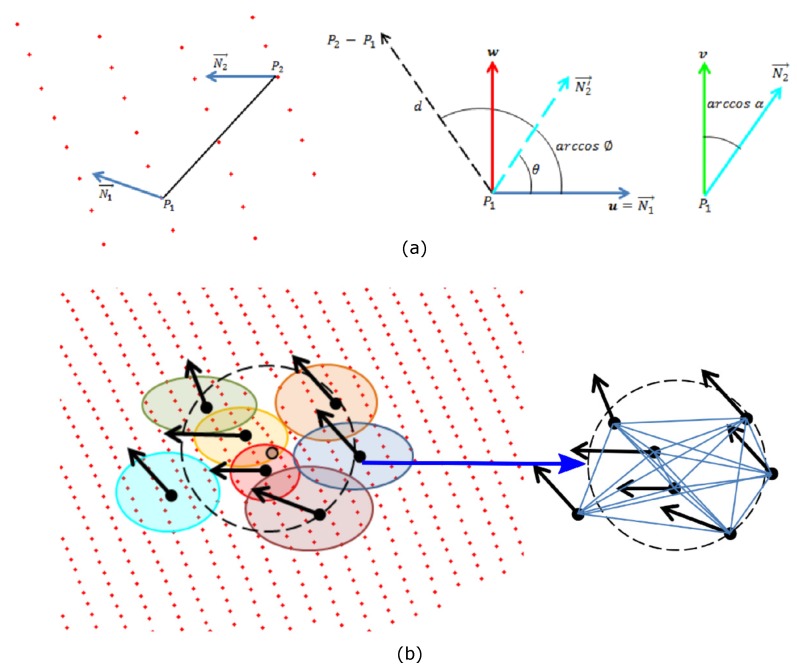
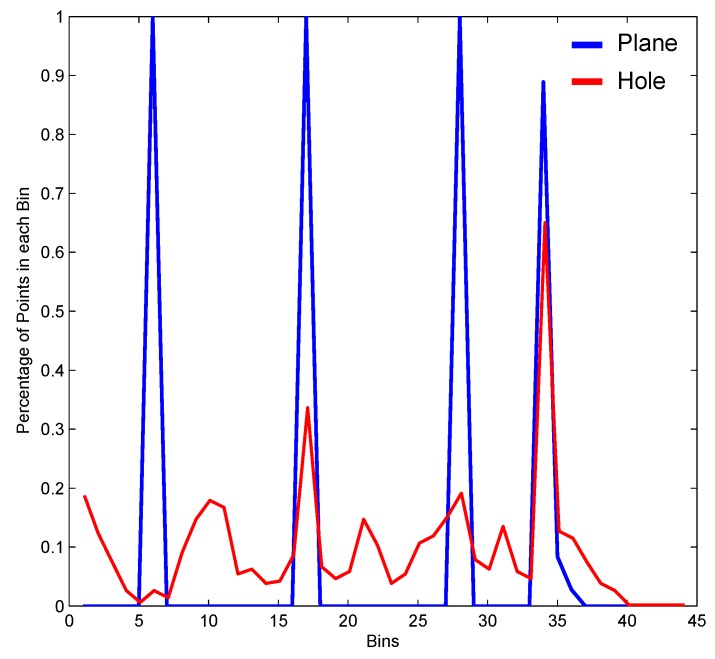
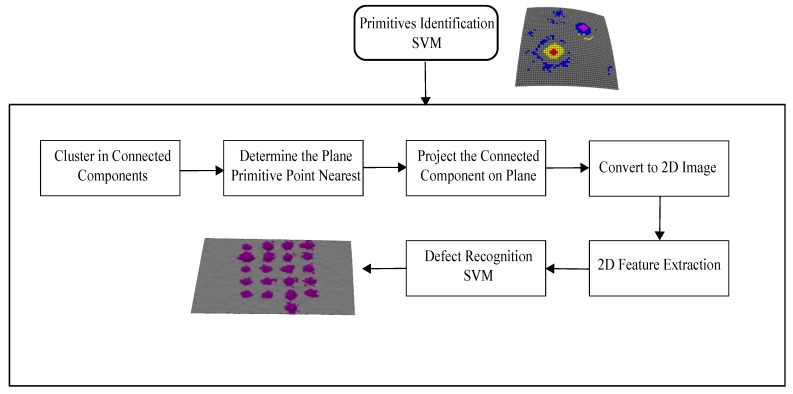
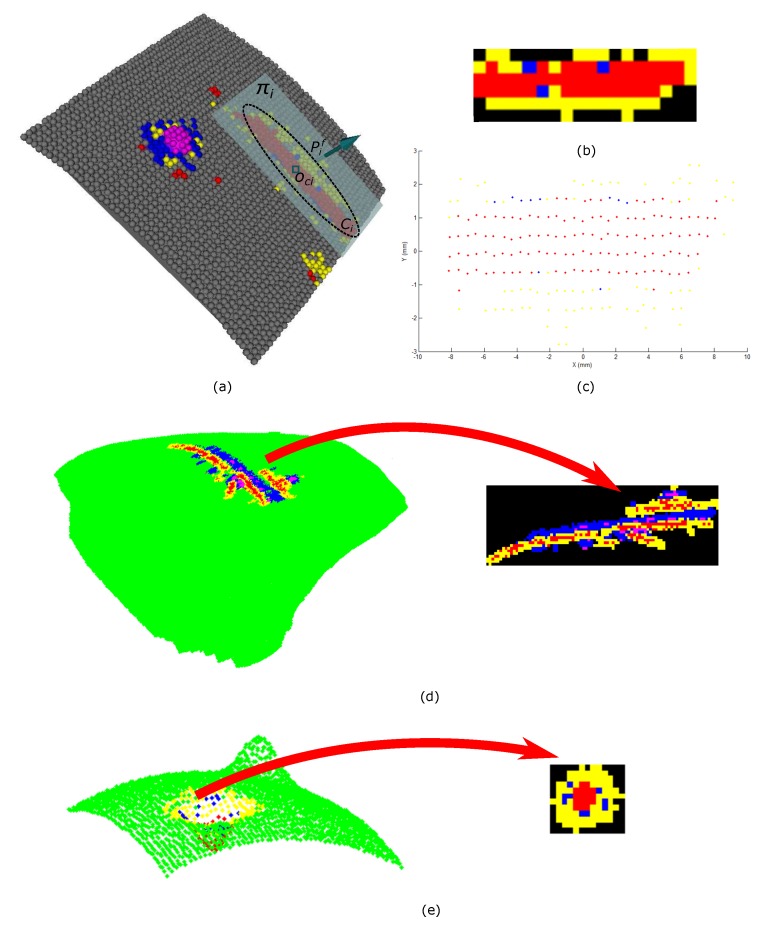
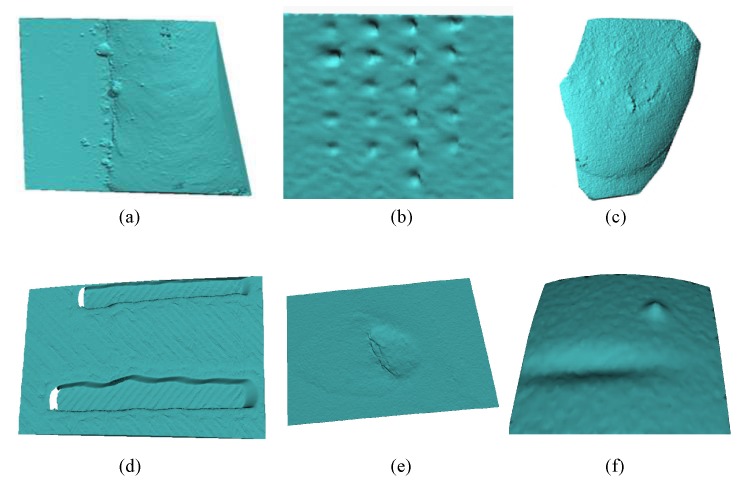
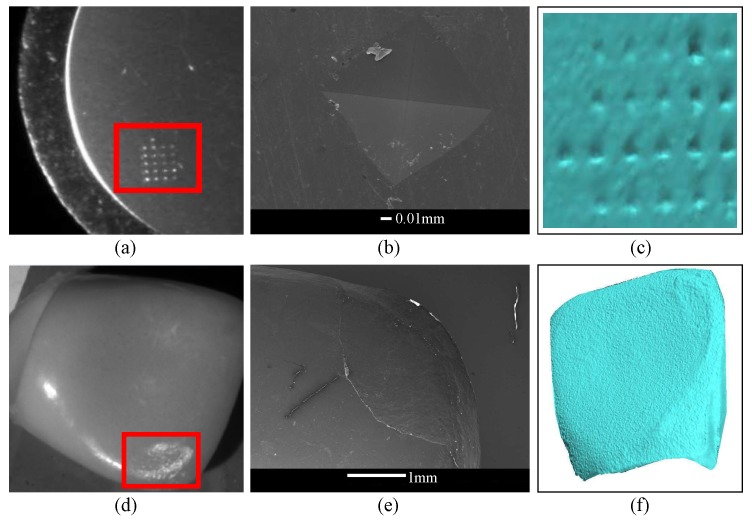
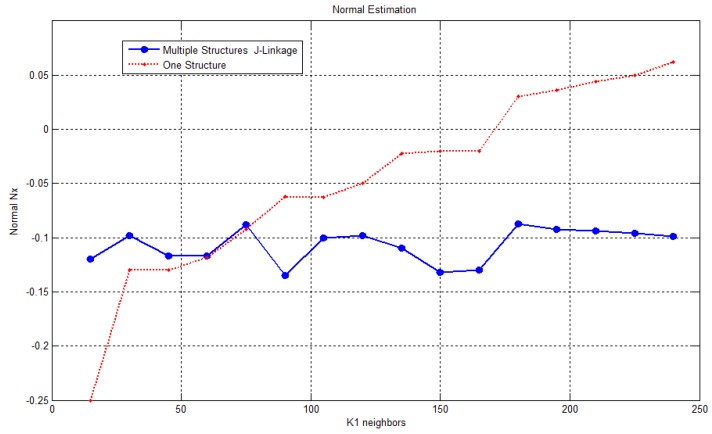
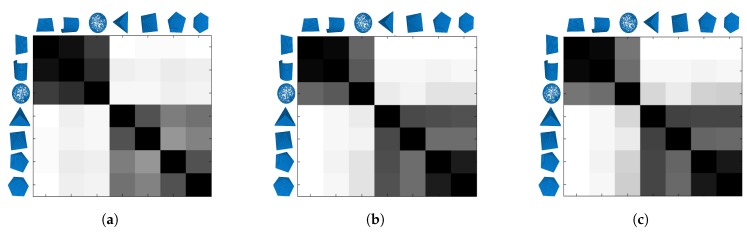
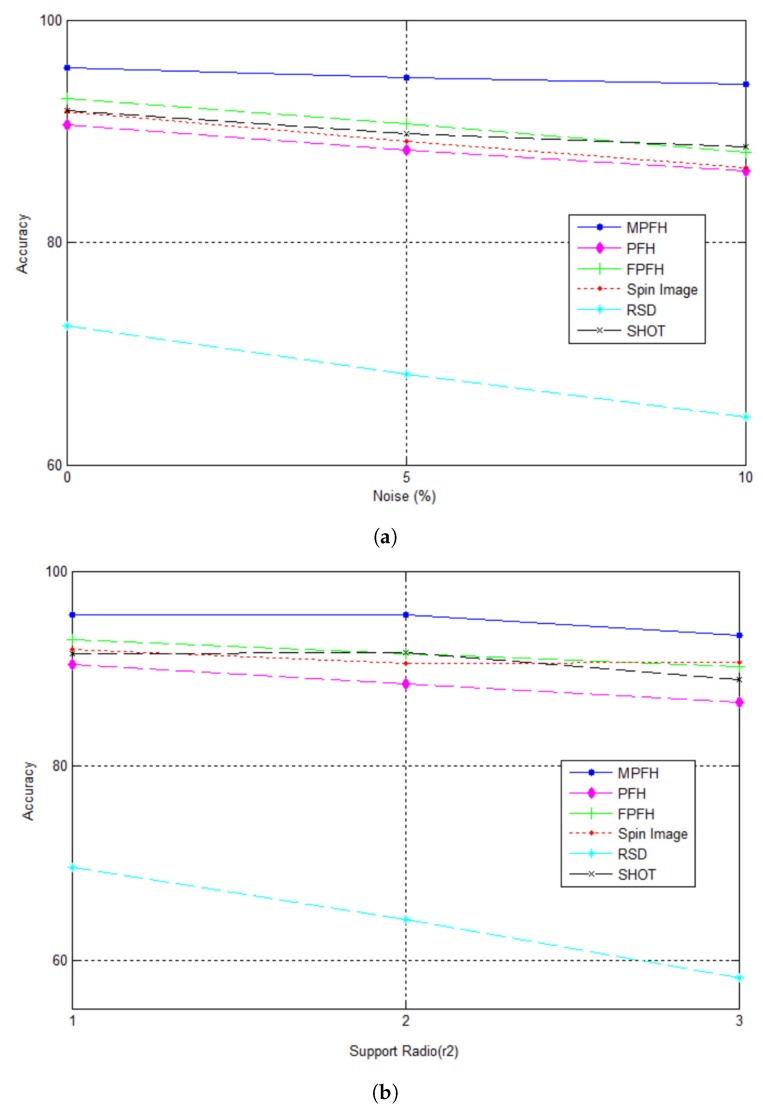
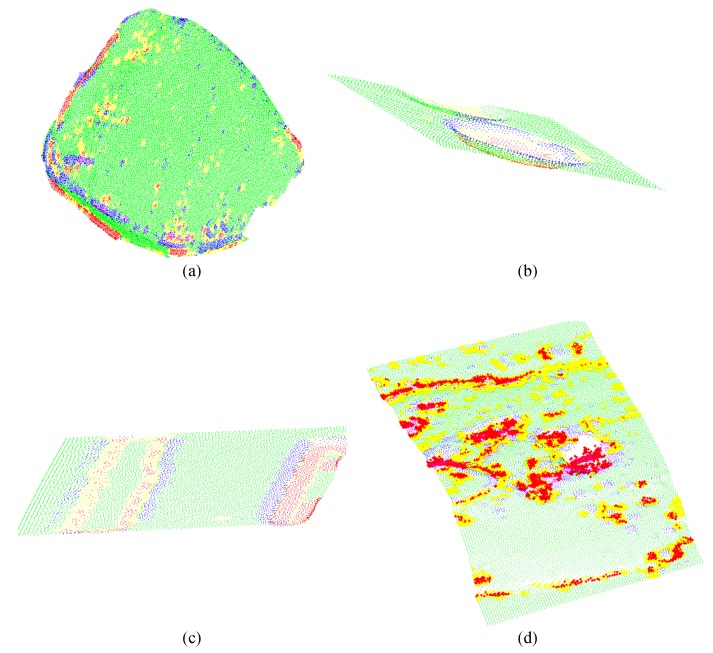
Automatic visual inspection allows for the identification of surface defects in manufactured parts. Nevertheless, when defects are on a sub-millimeter scale, detection and recognition are a challenge. This is particularly true when the defect generates topological deformations that are not shown with strong contrast in the 2D image. In this paper, we present a method for recognizing surface defects in 3D point clouds. Firstly, we propose a novel 3D local descriptor called the Model Point Feature Histogram (MPFH) for defect detection. Our descriptor is inspired from earlier descriptors such as the Point Feature Histogram (PFH). To construct the MPFH descriptor, the models that best fit the local surface and their normal vectors are estimated. For each surface model, its contribution weight to the formation of the surface region is calculated and from the relative difference between models of the same region a histogram is generated representing the underlying surface changes. Secondly, through a classification stage, the points on the surface are labeled according to five types of primitives and the defect is detected. Thirdly, the connected components of primitives are projected to a plane, forming a 2D image. Finally, 2D geometrical features are extracted and by a support vector machine, the defects are recognized. The database used is composed of 3D simulated surfaces and 3D reconstructions of defects in welding, artificial teeth, indentations in materials, ceramics and 3D models of defects. The quantitative and qualitative results showed that the proposed method of description is robust to noise and the scale factor, and it is sufficiently discriminative for detecting some surface defects. The performance evaluation of the proposed method was performed for a classification task of the 3D point cloud in primitives, reporting an accuracy of 95%, which is higher than for other state-of-art descriptors. The rate of recognition of defects was close to 94%.
自动视觉检测能够识别制造零件中的表面缺陷。然而,当缺陷处于亚毫米尺度时,检测和识别就成为一项挑战。当缺陷产生的拓扑变形在二维图像中没有强烈对比显示时,情况尤其如此。在本文中,我们提出了一种用于识别三维点云中表面缺陷的方法。首先,我们提出了一种名为模型点特征直方图(MPFH)的新型三维局部描述符用于缺陷检测。我们的描述符受到诸如点特征直方图(PFH)等早期描述符的启发。为了构建MPFH描述符,需要估计最适合局部表面的模型及其法向量。对于每个表面模型,计算其对表面区域形成的贡献权重,并根据同一区域模型之间的相对差异生成一个直方图,以表示潜在的表面变化。其次,通过一个分类阶段,根据五种原语类型对表面上的点进行标记并检测缺陷。第三,将原语的连通分量投影到一个平面上,形成一幅二维图像。最后,提取二维几何特征,并通过支持向量机识别缺陷。所使用的数据库由三维模拟表面以及焊接、人造牙齿、材料压痕、陶瓷中的缺陷三维重建和缺陷三维模型组成。定量和定性结果表明,所提出的描述方法对噪声和比例因子具有鲁棒性,并且对于检测某些表面缺陷具有足够的区分能力。针对三维点云在原语中的分类任务对所提出方法进行了性能评估,报告的准确率为95%,高于其他现有描述符。缺陷识别率接近94%。