Audette Michel A, Bordas Stéphane P A, Blatt Jason E
Department of Computational Modeling and Simulation Engineering, Old Dominion University, Norfolk, VA, USA.
Institute of Computational Engineering, University of Luxembourg, Faculty of Sciences Communication and Technology, Esch-Sur-Alzette, Luxembourg.
Robot Surg. 2020 Mar 19;7:1-23. doi: 10.2147/RSRR.S224446. eCollection 2020.
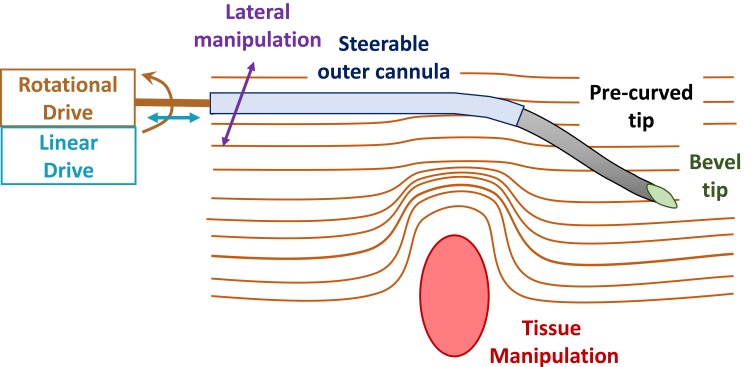
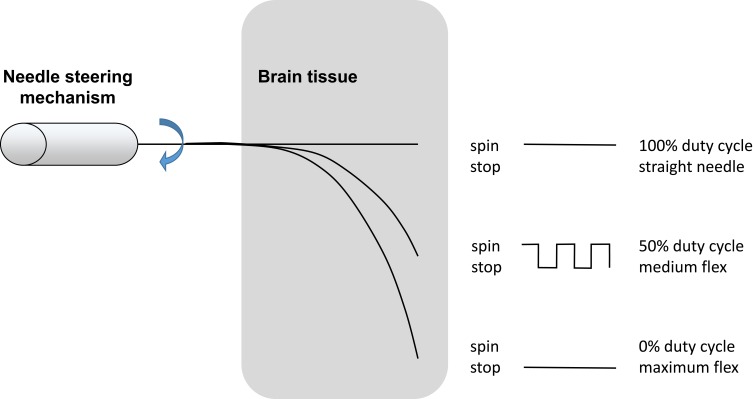
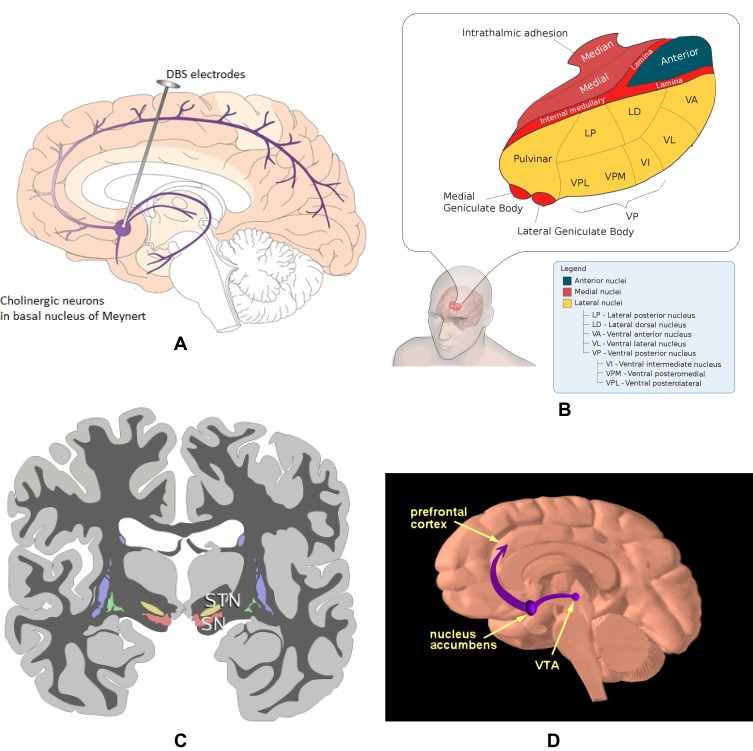
This paper surveys both the clinical applications and main technical innovations related to steered needles, with an emphasis on neurosurgery. Technical innovations generally center on curvilinear robots that can adopt a complex path that circumvents critical structures and eloquent brain tissue. These advances include several needle-steering approaches, which consist of tip-based, lengthwise, base motion-driven, and tissue-centered steering strategies. This paper also describes foundational mathematical models for steering, where potential fields, nonholonomic bicycle-like models, spring models, and stochastic approaches are cited. In addition, practical path planning systems are also addressed, where we cite uncertainty modeling in path planning, intraoperative soft tissue shift estimation through imaging scans acquired during the procedure, and simulation-based prediction. Neurosurgical scenarios tend to emphasize straight needles so far, and span deep-brain stimulation (DBS), stereoelectroencephalography (SEEG), intracerebral drug delivery (IDD), stereotactic brain biopsy (SBB), stereotactic needle aspiration for hematoma, cysts and abscesses, and brachytherapy as well as thermal ablation of brain tumors and seizure-generating regions. We emphasize therapeutic considerations and complications that have been documented in conjunction with these applications.
本文综述了与导向针相关的临床应用和主要技术创新,重点是神经外科领域。技术创新通常围绕曲线机器人展开,这些机器人能够采用复杂路径以避开关键结构和明确的脑组织。这些进展包括几种针导向方法,其中有基于针尖、沿长度方向、基于基座运动驱动以及以组织为中心的导向策略。本文还描述了导向的基础数学模型,其中引用了势场、非完整自行车模型、弹簧模型和随机方法。此外,还讨论了实际的路径规划系统,其中我们引用了路径规划中的不确定性建模、通过手术过程中获取的成像扫描进行术中软组织移位估计以及基于模拟的预测。到目前为止,神经外科手术场景往往更强调直针,涵盖深部脑刺激(DBS)、立体脑电图(SEEG)、脑内药物递送(IDD)、立体定向脑活检(SBB)、用于血肿、囊肿和脓肿的立体定向针吸术、近距离放射治疗以及脑肿瘤和癫痫发作区域的热消融。我们强调了与这些应用相关的治疗考量和已记录的并发症。