State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University, Wuhan 430079, China.
School of Remote Sensing and Information Engineering, Wuhan University, Wuhan 430079, China.
Sensors (Basel). 2020 Apr 12;20(8):2183. doi: 10.3390/s20082183.
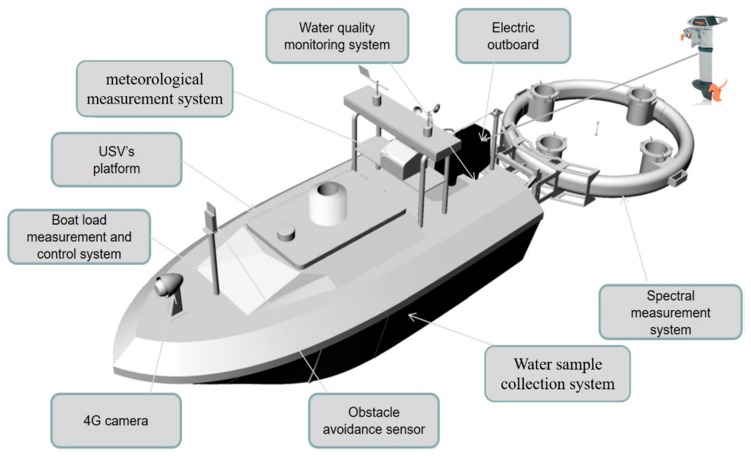
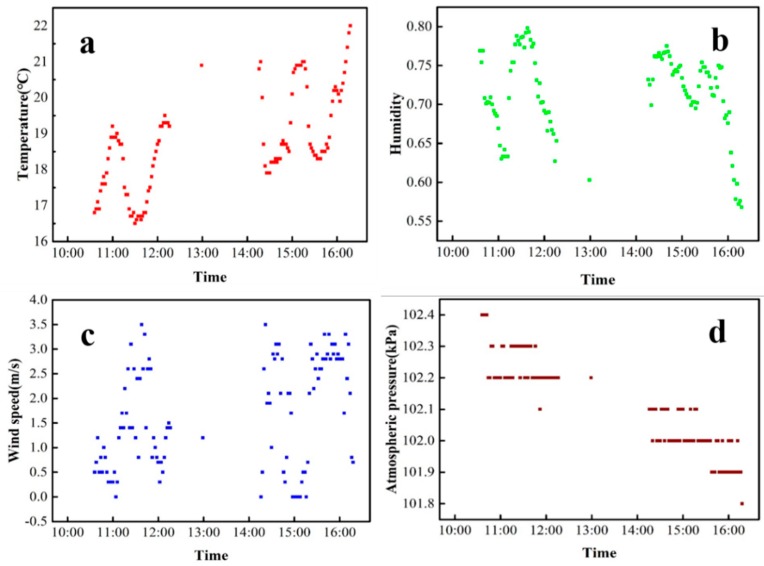
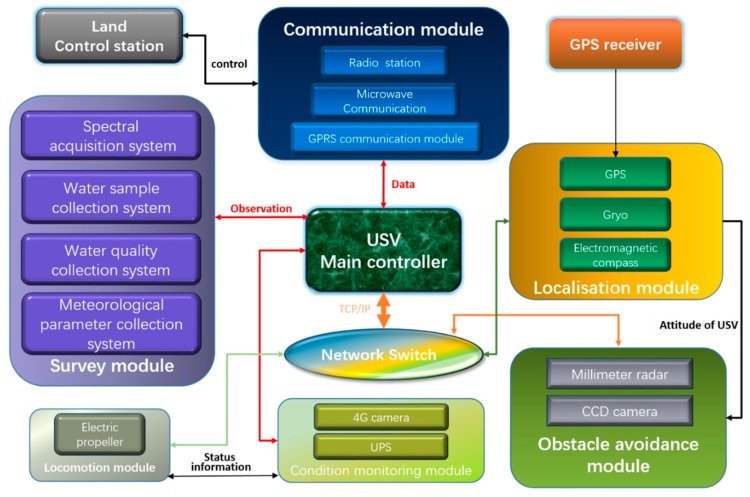
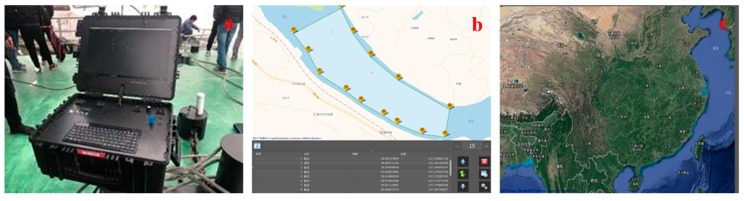
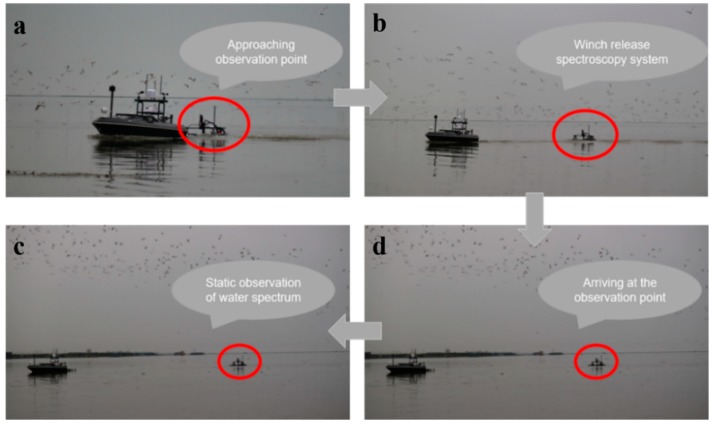
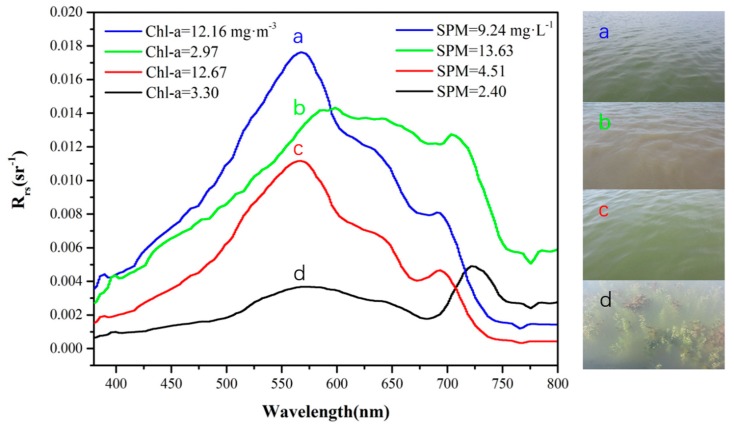
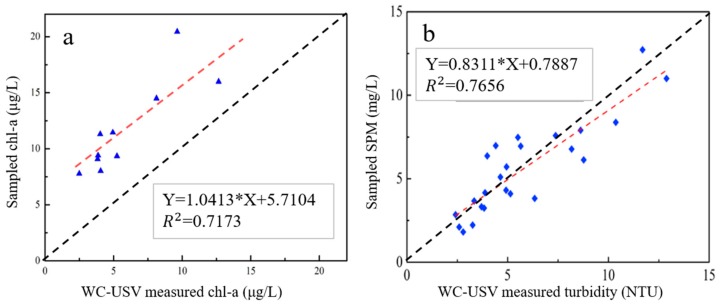
Integrated and intelligent in situ observations are important for the remote sensing monitoring of dynamic water environments. To meet the field investigation requirements of ocean color remote sensing, we developed a water color remote sensing-oriented unmanned surface vehicle (WC-USV), which consisted of an unmanned surface vehicle platform with ground control station, data acquisition, and transmission modules. The WC-USV was designed with functions, such as remote controlling, status monitoring, automatic obstacle avoidance, and water and meteorological parameter measurement acquisition, transmission, and processing. The key data acquisition module consisted of four parts: A floating optical buoy (FOBY) for collecting remote sensing reflectance ( R r s ) via the skylight-blocked approach; a water sample autocollection system that can collect 12 1-L bottles for analysis in the laboratory; a water quality measurement system for obtaining water parameters, including Chlorophyll-a (Chl-a), turbidity, and water temperature, among others; and meteorological sensors for measuring wind speed and direction, air pressure, temperature, and humidity. Field experiments were conducted to validate the performance of the WC-USV on 23-28 March 2018 in the Honghu Lake, which is the seventh largest freshwater lake in China. The tests proved the following: (1) The WC-USV performed well in terms of autonomous navigation and obstacle avoidance; (2) the mounted FOBY-derived R r s showed good precision in terms of the quality assurance score (QAS), which was higher than 0.98; (3) the Chl-a and suspended matters (SPM) as ocean color parameters measured by the WC-USV were highly consistent with laboratory analysis results, with determination coefficients (R) of 0.71 and 0.77, respectively; and (4) meteorological parameters could be continuously and stably measured by WC-USV. Results demonstrated the feasibility and practicability of the WC-USV for automatic in situ observations. The USV provided a new way of thinking for the future development of intelligent automation of the aquatic remote sensing ground verification system. It could be a good option to conduct field investigations for ocean color remote sensing and provide an alternative for highly polluted and/or shallow high-risk waters which large vessels have difficulty reaching.
集成和智能的原位观测对于动态水环境的遥感监测至关重要。为了满足海洋水色遥感的现场调查要求,我们开发了一种面向水色遥感的无人水面艇(WC-USV),它由一个带有地面控制站、数据采集和传输模块的无人水面艇平台组成。WC-USV 设计有远程控制、状态监测、自动避障以及水温和气象参数测量、采集、传输和处理等功能。关键的数据采集模块由四个部分组成:一个浮标光学浮标(FOBY),用于通过天空遮光方法采集遥感反射率(Rrs);一个水样自动采集系统,可采集 12 个 1 升瓶,用于实验室分析;一个水质测量系统,用于获取包括叶绿素-a(Chl-a)、浊度和水温在内的水参数;以及气象传感器,用于测量风速和风向、气压、温度和湿度。2018 年 3 月 23 日至 28 日,在中国第七大淡水湖洪湖进行了现场试验,以验证 WC-USV 的性能。试验证明:(1)WC-USV 在自主导航和避障方面表现良好;(2)安装的 FOBY 衍生的 Rrs 在质量保证分数(QAS)方面精度良好,高于 0.98;(3)WC-USV 测量的海洋水色参数叶绿素-a 和悬浮物(SPM)与实验室分析结果高度一致,决定系数(R)分别为 0.71 和 0.77;(4)气象参数可以由 WC-USV 连续稳定地测量。结果表明,WC-USV 用于自动原位观测是可行和实用的。该 USV 为未来智能自动化水色遥感地面验证系统的发展提供了新的思路。它可以为海洋水色遥感的现场调查提供一种新的选择,也可以为大型船舶难以到达的高污染和/或浅高危水域提供替代方案。