Segato Alice, Pieri Valentina, Favaro Alberto, Riva Marco, Falini Andrea, De Momi Elena, Castellano Antonella
Department of Electronics, Information and Bioengineering, Politecnico di Milano, Milan, Italy.
Neuroradiology Unit and CERMAC, IRCCS Ospedale San Raffaele, Vita-Salute San Raffaele University, Milan, Italy.
Front Robot AI. 2019 Aug 6;6:70. doi: 10.3389/frobt.2019.00070. eCollection 2019.
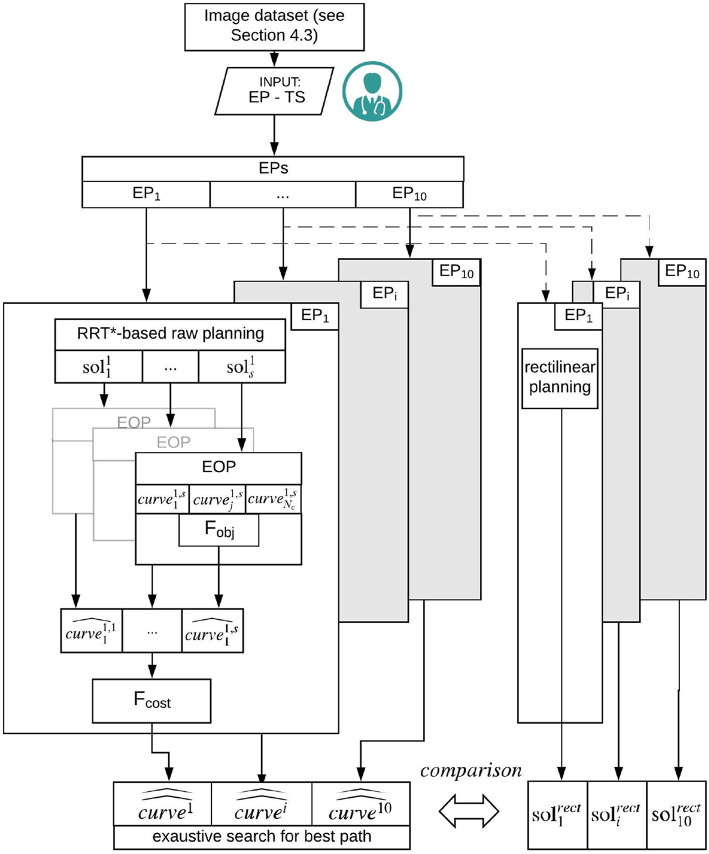
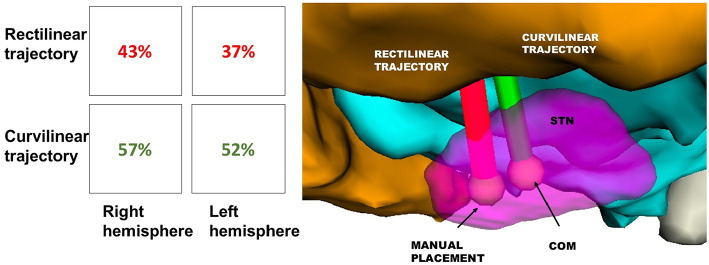
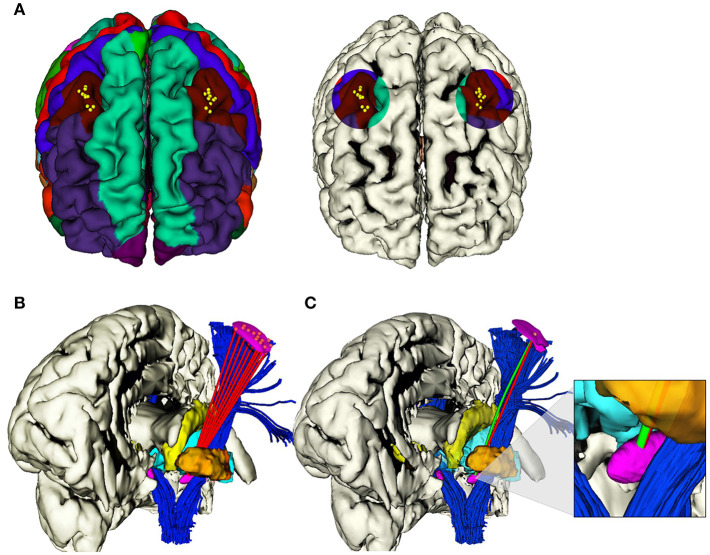
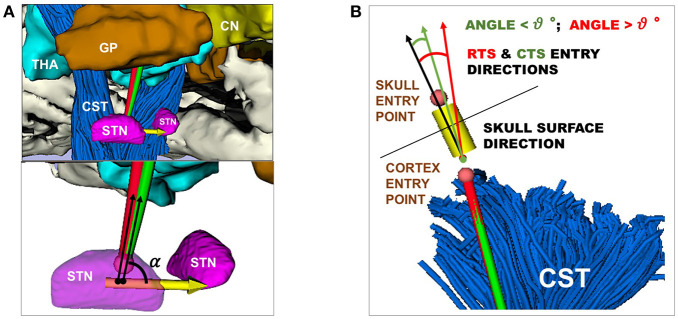
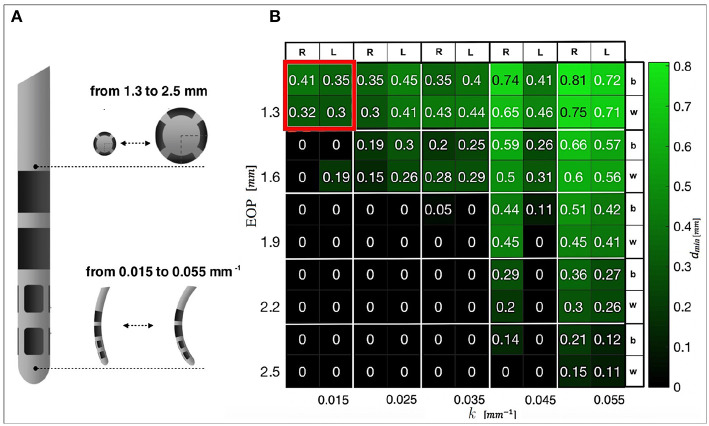
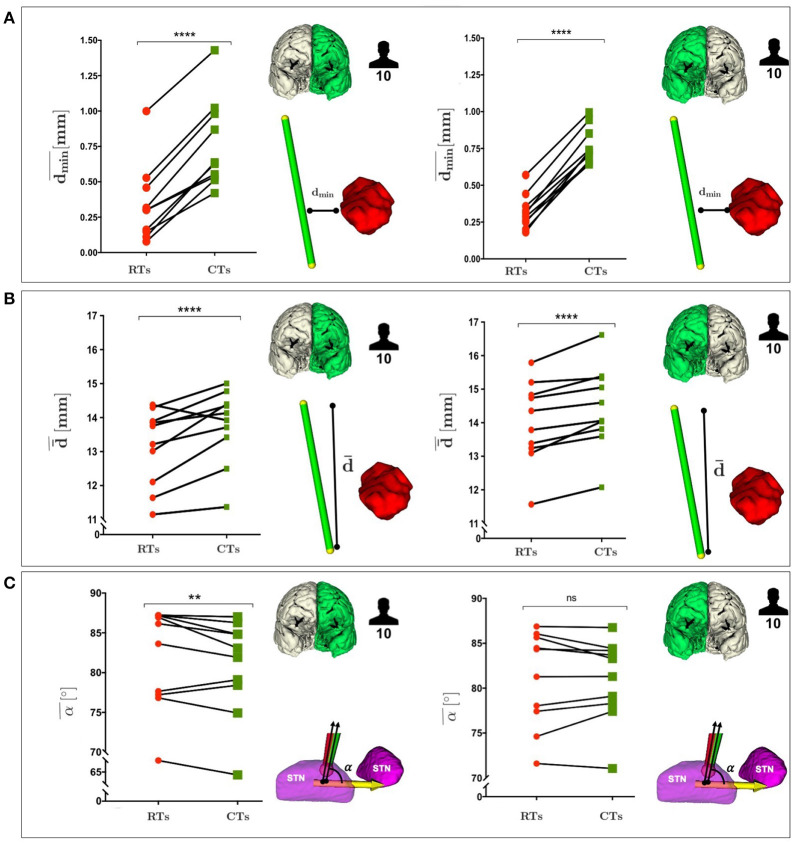
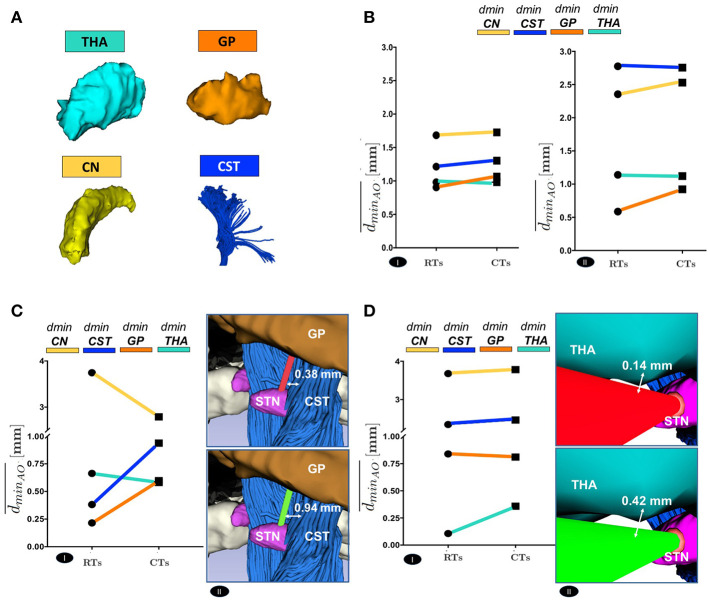
Deep Brain Stimulation (DBS) is a neurosurgical procedure consisting in the stereotactic implantation of stimulation electrodes to specific brain targets, such as deep gray matter nuclei. Current solutions to place the electrodes rely on rectilinear stereotactic trajectories (RTs) manually defined by surgeons, based on pre-operative images. An automatic path planner that accurately targets subthalamic nuclei (STN) and safeguards critical surrounding structures is still lacking. Also, robotically-driven curvilinear trajectories (CTs) computed on the basis of state-of-the-art neuroimaging would decrease DBS invasiveness, circumventing patient-specific obstacles. This work presents a new algorithm able to estimate a pool of DBS curvilinear trajectories for reaching a given deep target in the brain, in the context of the EU's Horizon EDEN2020 project. The prospect of automatically computing trajectory plans relying on sophisticated newly engineered steerable devices represents a breakthrough in the field of microsurgical robotics. By tailoring the paths according to single-patient anatomical constraints, as defined by advanced preoperative neuroimaging including diffusion MR tractography, this planner ensures a higher level of safety than the standard rectilinear approach. Ten healthy controls underwent Magnetic Resonance Imaging (MRI) on 3T scanner, including 3DT1-weighted sequences, 3Dhigh-resolution time-of-flight MR angiography (TOF-MRA) and high angular resolution diffusion MR sequences. A probabilistic q-ball residual-bootstrap MR tractography algorithm was used to reconstruct motor fibers, while the other deep gray matter nuclei surrounding STN and vessels were segmented on T1 and TOF-MRA images, respectively. These structures were labeled as obstacles. The reliability of the automated planner was evaluated; CTs were compared to RTs in terms of efficacy and safety. Targeting the anterior STN, CTs performed significantly better in maximizing the minimal distance from critical structures, by finding a tuned balance between all obstacles. Moreover, CTs resulted superior in reaching the center of mass (COM) of STN, as well as in optimizing the entry angle in STN and in the skull surface.
脑深部电刺激(DBS)是一种神经外科手术,包括将刺激电极立体定向植入特定的脑靶点,如深部灰质核团。目前放置电极的方法依赖于外科医生根据术前图像手动定义的直线立体定向轨迹(RTs)。仍然缺乏一种能够准确靶向丘脑底核(STN)并保护周围关键结构的自动路径规划器。此外,基于最先进的神经影像学计算的机器人驱动的曲线轨迹(CTs)将降低DBS的侵入性,规避患者特有的障碍。在欧盟的“地平线EDEN2020”项目背景下,这项工作提出了一种新算法,能够估计一组用于到达大脑中给定深部靶点的DBS曲线轨迹。依靠先进的新设计的可操纵设备自动计算轨迹计划的前景代表了显微外科机器人领域的一项突破。通过根据包括扩散磁共振纤维束成像在内的先进术前神经影像学所定义的单患者解剖学限制来定制路径,该规划器确保了比标准直线方法更高的安全水平。十名健康对照者在3T扫描仪上接受了磁共振成像(MRI)检查,包括3D T1加权序列、3D高分辨率时间飞跃磁共振血管造影(TOF-MRA)和高角分辨率扩散磁共振序列。使用概率q球残差自举磁共振纤维束成像算法重建运动纤维,而分别在T1和TOF-MRA图像上分割STN周围的其他深部灰质核团和血管。这些结构被标记为障碍物。评估了自动规划器的可靠性;在有效性和安全性方面将CTs与RTs进行了比较。针对前STN,CTs在最大化与关键结构的最小距离方面表现明显更好,通过在所有障碍物之间找到一个调整后的平衡。此外,CTs在到达STN的质心(COM)、优化进入STN和颅骨表面的角度方面表现更优。