Torricelli Diego, Rodriguez-Guerrero Carlos, Veneman Jan F, Crea Simona, Briem Kristin, Lenggenhager Bigna, Beckerle Philipp
Cajal institute, Spanish National Research Council (CSIC), Madrid, Spain.
Robotics and Multibody Mechanics Research Group, Department of Mechanical Engineering, Vrije Universiteit Brussel and Flanders Make, Brussels, Belgium.
Front Robot AI. 2020 Nov 13;7:561774. doi: 10.3389/frobt.2020.561774. eCollection 2020.
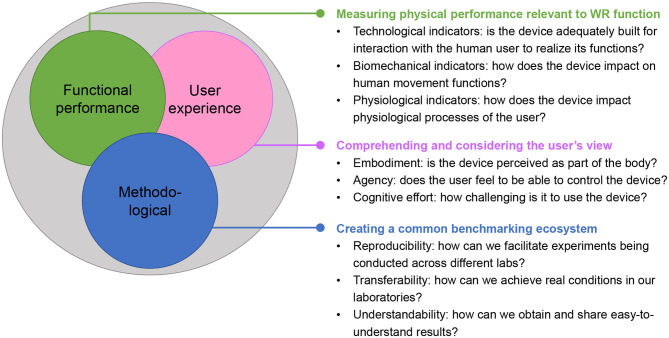
Wearable robots (WRs) are increasingly moving out of the labs toward real-world applications. In order for WRs to be effectively and widely adopted by end-users, a common benchmarking framework needs to be established. In this article, we outline the perspectives that in our opinion are the main determinants of this endeavor, and exemplify the complex landscape into three areas. The first perspective is related to quantifying the technical performance of the device and the physical impact of the device on the user. The second one refers to the understanding of the user's perceptual, emotional, and cognitive experience of (and with) the technology. The third one proposes a strategic path for a global benchmarking methodology, composed by reproducible experimental procedures representing real-life conditions. We hope that this paper can enable developers, researchers, clinicians and end-users to efficiently identify the most promising directions for validating their technology and drive future research efforts in the short and medium term.
可穿戴机器人(WRs)正越来越多地走出实验室,迈向实际应用。为了使可穿戴机器人能够被终端用户有效且广泛地采用,需要建立一个通用的基准测试框架。在本文中,我们概述了我们认为是这一努力的主要决定因素的观点,并将复杂的情况归纳为三个领域。第一个观点与量化设备的技术性能以及设备对用户的身体影响有关。第二个观点涉及对用户对该技术的感知、情感和认知体验的理解。第三个观点提出了一种全球基准测试方法的战略路径,该方法由代表现实生活条件的可重复实验程序组成。我们希望本文能使开发者、研究人员、临床医生和终端用户有效地确定验证其技术最有前景的方向,并在短期和中期推动未来的研究工作。