Zhang Chen, Shu Zeliang, Yuan Yanjie, Gan Xiaoming, Yu Fuhang
College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China.
Jiangsu Jingjiang Instrument Transformer Co., Ltd., 206 Xingang Avenue, Jingjiang 214500, China.
Micromachines (Basel). 2023 Oct 21;14(10):1961. doi: 10.3390/mi14101961.
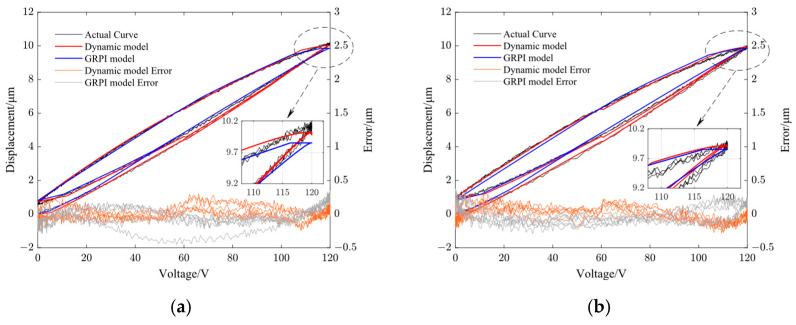
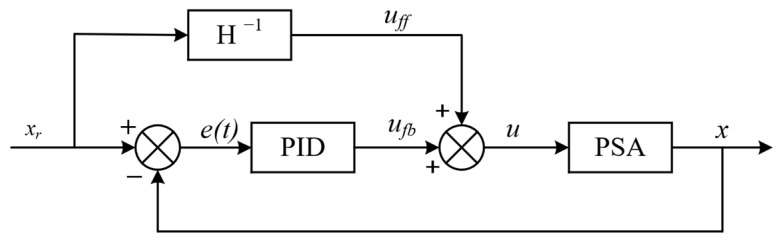
To improve the machining quality of the non-resonant elliptical vibration cutting (EVC) device, a compound control method for trajectory error compensation is proposed in this paper. Firstly, by analyzing the working principle of non-resonant EVC device and considering the elliptical trajectory error caused by piezoelectric hysteresis, a dynamic PI (Prandtl-Ishlinskii) model relating to voltage change rate and acceleration was established to describe the piezoelectric hysteresis characteristics of EVC devices. Then, the parameters of the dynamic PI model were identified by using the particle swarm optimization (PSO) algorithm. Secondly, based on the dynamic PI model, a compound control method has been proposed in which the inverse dynamic PI model is used as the feedforward controller for the dynamic hysteresis compensation, while PID (proportion integration differentiation) feedback is used to improve the control accuracy. Finally, trajectory-tracking experiments have been conducted to verify the feasibility of the proposed compound control method.
为提高非共振椭圆振动切削(EVC)装置的加工质量,本文提出一种轨迹误差补偿的复合控制方法。首先,通过分析非共振EVC装置的工作原理,并考虑压电滞后引起的椭圆轨迹误差,建立了一个与电压变化率和加速度相关的动态PI(Prandtl-Ishlinskii)模型,以描述EVC装置的压电滞后特性。然后,利用粒子群优化(PSO)算法识别动态PI模型的参数。其次,基于动态PI模型,提出了一种复合控制方法,其中逆动态PI模型用作动态滞后补偿的前馈控制器,同时采用PID(比例积分微分)反馈来提高控制精度。最后,进行了轨迹跟踪实验,以验证所提出的复合控制方法的可行性。