Li Jingjing, Chen Zhen, Li Jian, Yan Hongyu, Li Zhen, Feng Minshan, Zhan Jiawen, Shao Liwei
School of Automation, Beijing Institute of Technology, Beijing, China.
Greater Bay Area Innovation Institute, Beijing Institute of Technology, Zhuhai, China.
Front Bioeng Biotechnol. 2025 May 23;13:1609548. doi: 10.3389/fbioe.2025.1609548. eCollection 2025.
Upper-limb rehabilitation robots have been demonstrated to effectively promote motor recovery in stroke patients. However, in active training modes, control instability may be induced by the nonlinear and time-varying characteristics of muscle fatigue, increasing the risks of physical human-robot interaction and ultimately limiting rehabilitation outcomes.
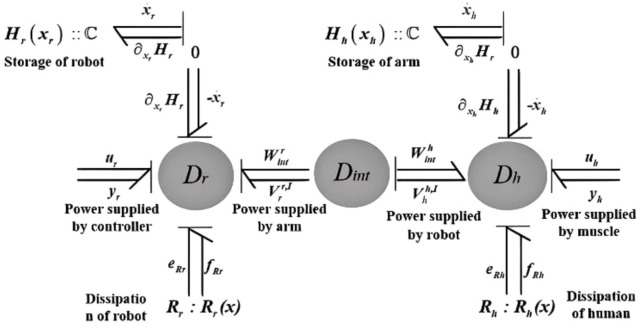
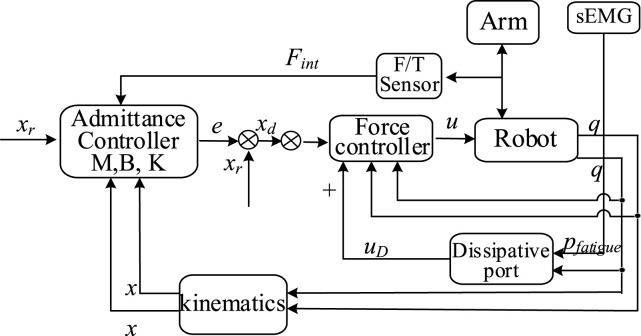
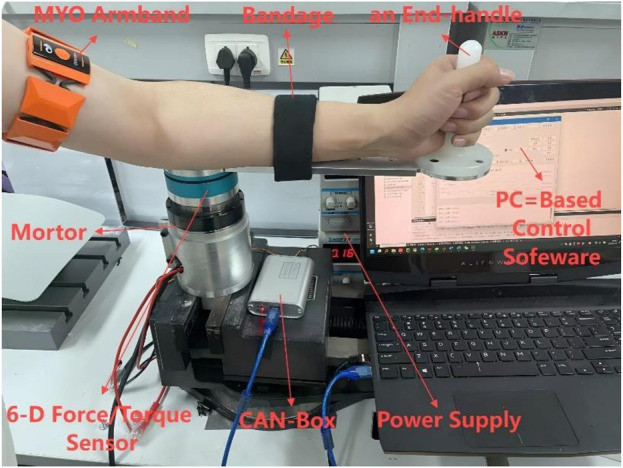
A novel control strategy within the port-Hamiltonian framework, incorporating a dynamic muscle fatigue model. Fatigue levels were assessed in real time using surface electromyography (sEMG) signals and mapped to damping parameters in joint space, enabling the port-based modeling of fatigue-related energy dissipation. A hierarchical control architecture was constructed, consisting of outer-loop admittance control and inner-loop energy shaping.
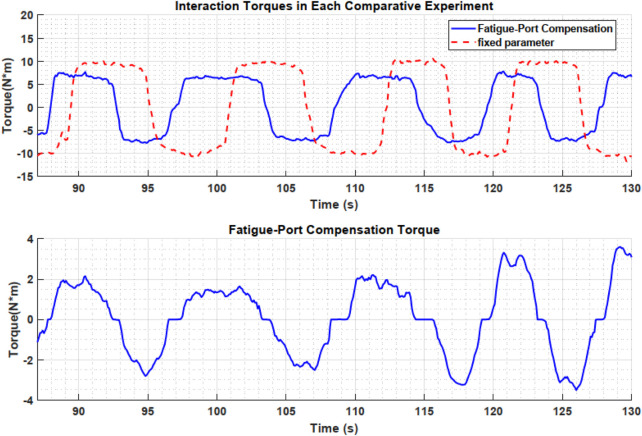
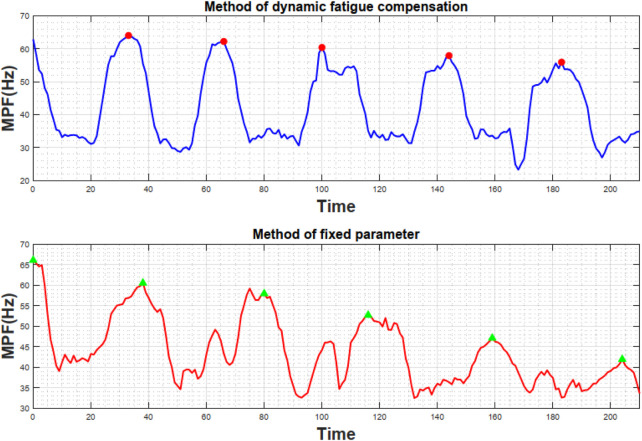
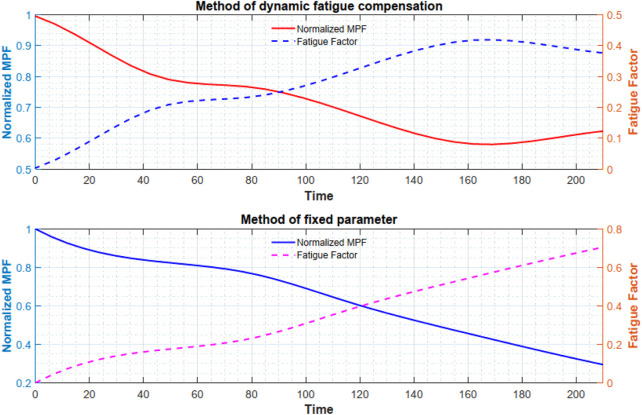
Theoretical analysis confirmed that the closed-loop passivity of the system was preserved and stability was ensured. Experimental validation further showed that, compared to fixed damping parameters, the proposed fatigue compensation approach reduced muscle fatigue accumulation by 45% and increased training duration by 40%.
The proposed fatigue-adaptive control framework was shown to enhance the safety, effectiveness, and physiological adaptability of rehabilitation training. The integration of real-time sEMG feedback and port-Hamiltonian modeling offers a promising solution for personalized robotic rehabilitation.
上肢康复机器人已被证明能有效促进中风患者的运动恢复。然而,在主动训练模式下,肌肉疲劳的非线性和时变特性可能会导致控制不稳定,增加人机交互的风险,并最终限制康复效果。
提出一种基于端口哈密顿框架的新型控制策略,该策略纳入了动态肌肉疲劳模型。使用表面肌电图(sEMG)信号实时评估疲劳水平,并将其映射到关节空间中的阻尼参数,从而实现与疲劳相关的能量耗散的基于端口的建模。构建了一种分层控制架构,由外环导纳控制和内环能量整形组成。
理论分析证实系统的闭环无源性得以保持,稳定性得到保证。实验验证进一步表明,与固定阻尼参数相比,所提出的疲劳补偿方法使肌肉疲劳积累减少了45%,训练持续时间增加了40%。
所提出的疲劳自适应控制框架被证明可提高康复训练的安全性、有效性和生理适应性。实时sEMG反馈与端口哈密顿建模的结合为个性化机器人康复提供了一个有前景的解决方案。