Lützner J, Gross A F, Günther K P, Kirschner S
Department of Orthopaedic Surgery, University Hospital Carl Gustav Carus, Medical Faculty of the Technical University of Dresden, Dresden, Germany.
Eur J Med Res. 2009 Sep 28;14(10):447-50. doi: 10.1186/2047-783x-14-10-447.
High tibial osteotomy (HTO) is one treatment option for young and active patients with unicompartmental osteoarthritis. The success of this procedure substantially depends on the degree of correction of the mechanical axis. Computer-assisted navigation systems are believed to improve the precision of axis correction through intraoperative real-time monitoring. This study investigates the accuracy of limb alignment measurements with a navigation system on a cadaver specimen.
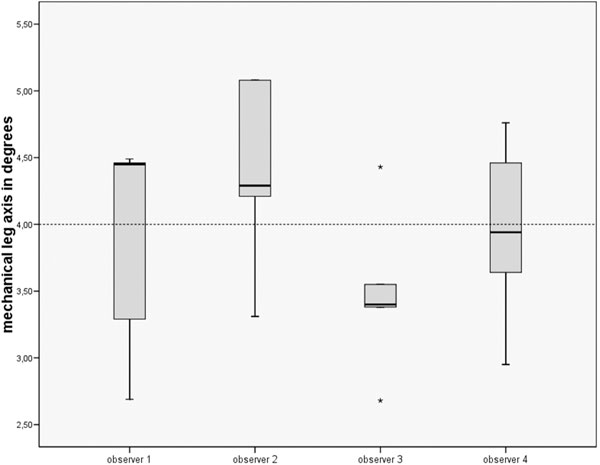
The measurements were performed on a well-preserved cadaver specimen with a mechanical leg axis of 4 degrees varus. Data was collected during the HTO workflow. Repeated serial measurements were undertaken by four different surgeons. After these measurements, different landmarks were deliberately set at the wrong place to examine the influence of mistakes during registration.
There was a high intra- and interobserver reliability with a mean mechanical leg axis of 3.9 degrees +/- 0.7 degrees and a mean error of 0.6 degrees. The grossly incorrect placement of landmarks for knee and ankle center resulted in an incorrect mechanical leg axis of 1 degrees valgus up to 10 degrees varus.
The computer-assisted navigation system provided precise information about the mechanical leg axis, irrespective of the observer's experience.
高位胫骨截骨术(HTO)是年轻且活跃的单间室骨关节炎患者的一种治疗选择。该手术的成功很大程度上取决于机械轴的矫正程度。计算机辅助导航系统被认为可通过术中实时监测提高轴矫正的精度。本研究在尸体标本上研究了使用导航系统进行肢体对线测量的准确性。
测量在一具保存完好、机械腿轴内翻4度的尸体标本上进行。数据在HTO工作流程中收集。由四位不同的外科医生进行重复的系列测量。在这些测量之后,故意将不同的标志点设置在错误的位置,以检查配准过程中错误的影响。
观察者内和观察者间可靠性较高,平均机械腿轴为3.9度±0.7度,平均误差为0.6度。膝关节和踝关节中心标志点的严重错误放置导致机械腿轴出现1度外翻至10度内翻的错误结果。
计算机辅助导航系统提供了关于机械腿轴的精确信息,与观察者的经验无关。