Biomechanical Engineering, Department of Mechanical Engineering, Delft University of Technology, Mekelweg 2, 2628 CD Delft, The Netherlands.
Exp Brain Res. 2011 Aug;213(1):49-61. doi: 10.1007/s00221-011-2776-y. Epub 2011 Jun 30.
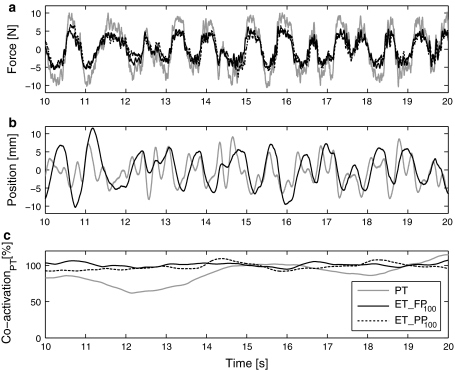
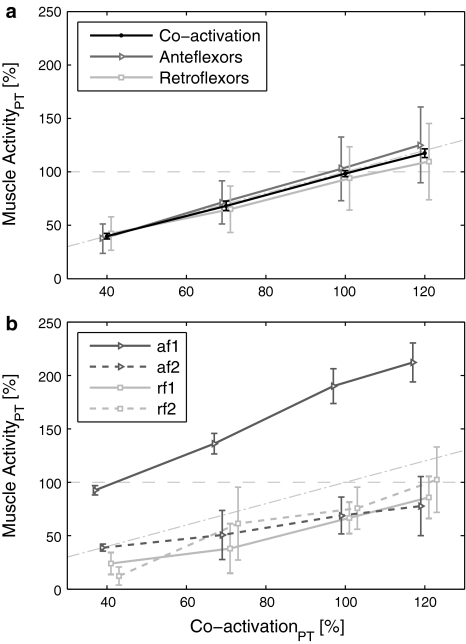
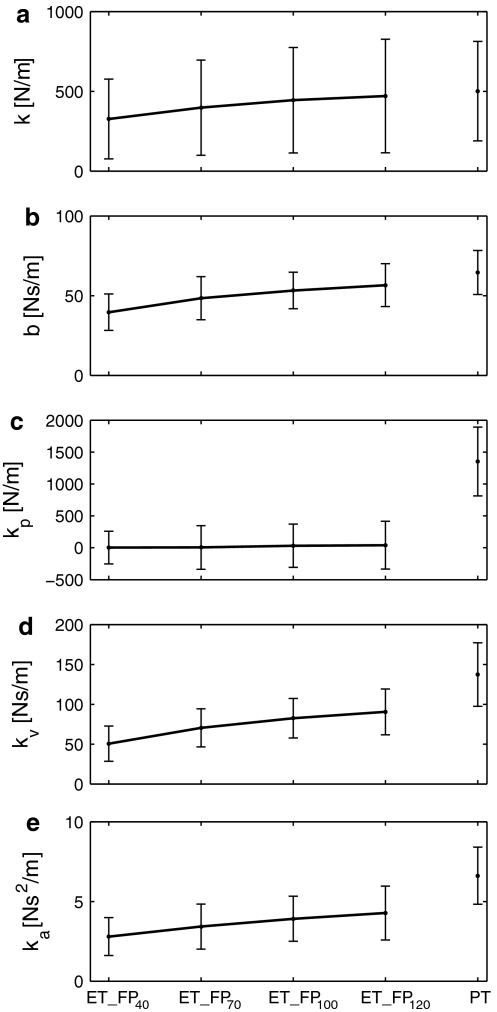
Force and position perturbations are widely applied to identify muscular and reflexive contributions to posture maintenance of the arm. Both task instruction (force vs. position) and the inherently linked perturbation type (i.e., force perturbations-position task and position perturbations-force tasks) affect these contributions and their mutual balance. The goal of this study is to explore the modulation of muscular and reflexive contributions in shoulder muscles using EMG biofeedback. The EMG biofeedback provides a harmonized task instruction to facilitate the investigation of perturbation type effects irrespective of task instruction. External continuous force and position perturbations with a bandwidth of 0.5-20 Hz were applied at the hand while subjects maintained prescribed constant levels of muscular co-activation using visual feedback of an EMG biofeedback signal. Joint admittance and reflexive impedance were identified in the frequency domain, and parametric identification separated intrinsic muscular and reflexive feedback properties. In tests with EMG biofeedback, perturbation type (position and force) had no effect on joint admittance and reflexive impedance, indicating task as the dominant factor. A reduction in muscular and reflexive stiffness was observed when performing the EMG biofeedback task relative to the position task. Reflexive position feedback was effectively suppressed during the equivalent EMG biofeedback task, while velocity and acceleration feedback were both decreased by approximately 37%. This indicates that force perturbations with position tasks are a more effective paradigm to investigate complete dynamic motor control of the arm, while EMG tasks tend to reduce the reflexive contribution.
力和位置扰动广泛应用于识别手臂姿势维持中的肌肉和反射贡献。任务指令(力与位置)和固有的扰动类型(即力扰动-位置任务和位置扰动-力任务)都影响这些贡献及其相互平衡。本研究的目的是使用肌电图生物反馈来探索肩部肌肉中肌肉和反射贡献的调节。肌电图生物反馈提供了一种协调的任务指令,便于研究扰动类型的影响,而不受任务指令的影响。在保持预定的肌肉共同激活水平的同时,通过肌电图生物反馈信号的视觉反馈,在手处施加外部连续力和位置扰动,带宽为 0.5-20 Hz。在频域中识别关节导纳和反射阻抗,并通过参数识别分离固有肌肉和反射反馈特性。在肌电图生物反馈测试中,扰动类型(位置和力)对关节导纳和反射阻抗没有影响,表明任务是主要因素。与位置任务相比,执行肌电图生物反馈任务时,肌肉和反射刚度降低。在等效的肌电图生物反馈任务中,有效地抑制了反射位置反馈,而速度和加速度反馈均降低了约 37%。这表明,在进行手臂完整动态运动控制的研究中,位置任务的力扰动是一种更有效的范式,而肌电图任务往往会降低反射贡献。