Marine Biology/Environmental Sciences, Roger Williams University, Bristol, Rhode Island, USA.
PLoS One. 2012;7(11):e48909. doi: 10.1371/journal.pone.0048909. Epub 2012 Nov 7.
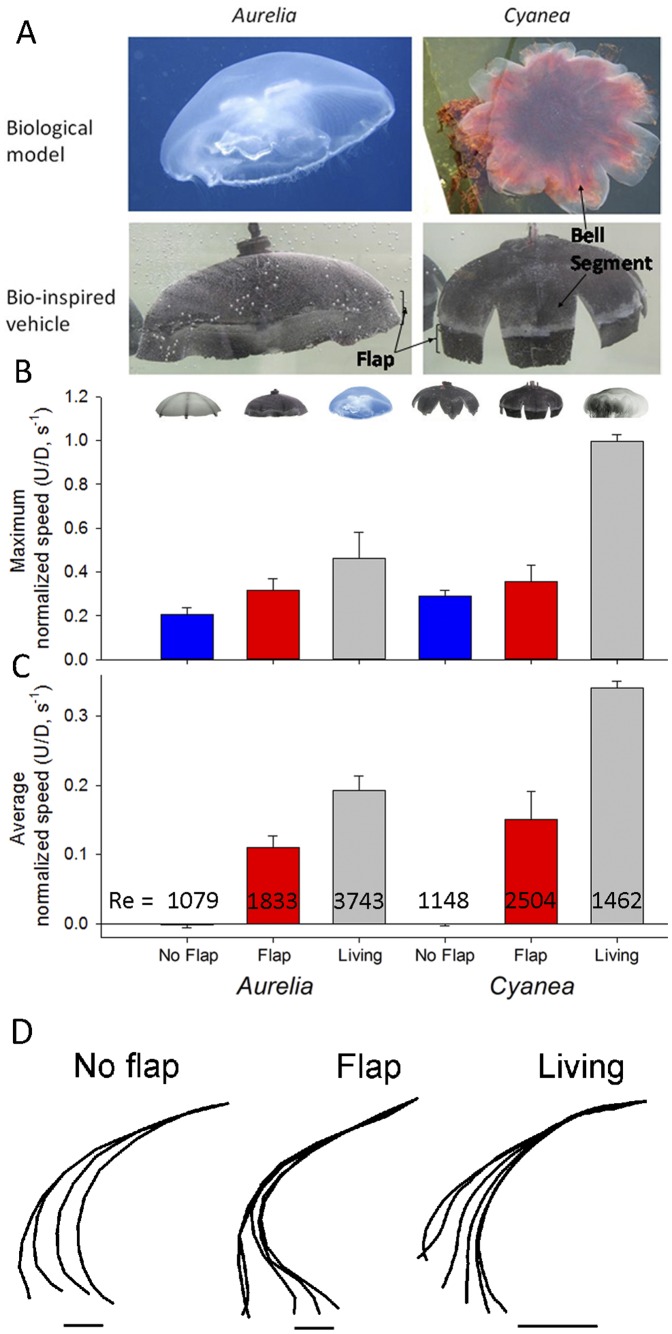
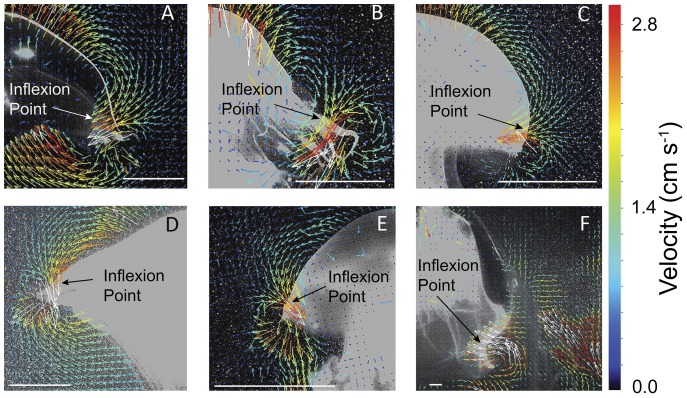
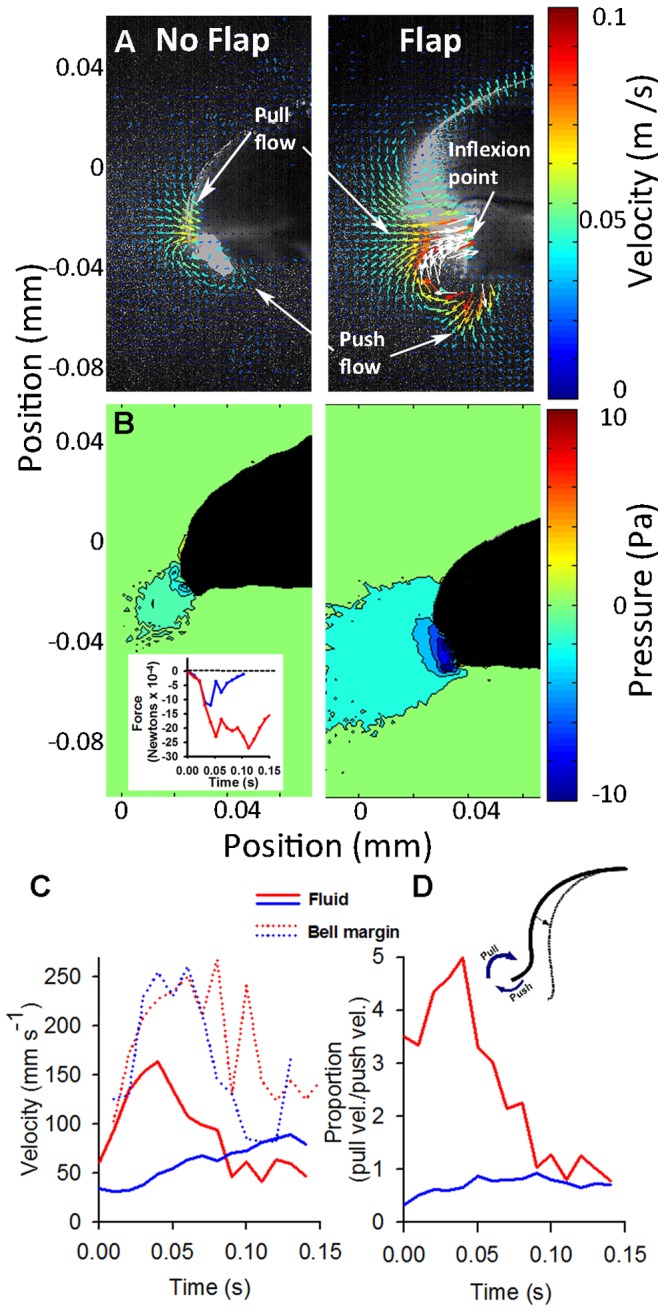
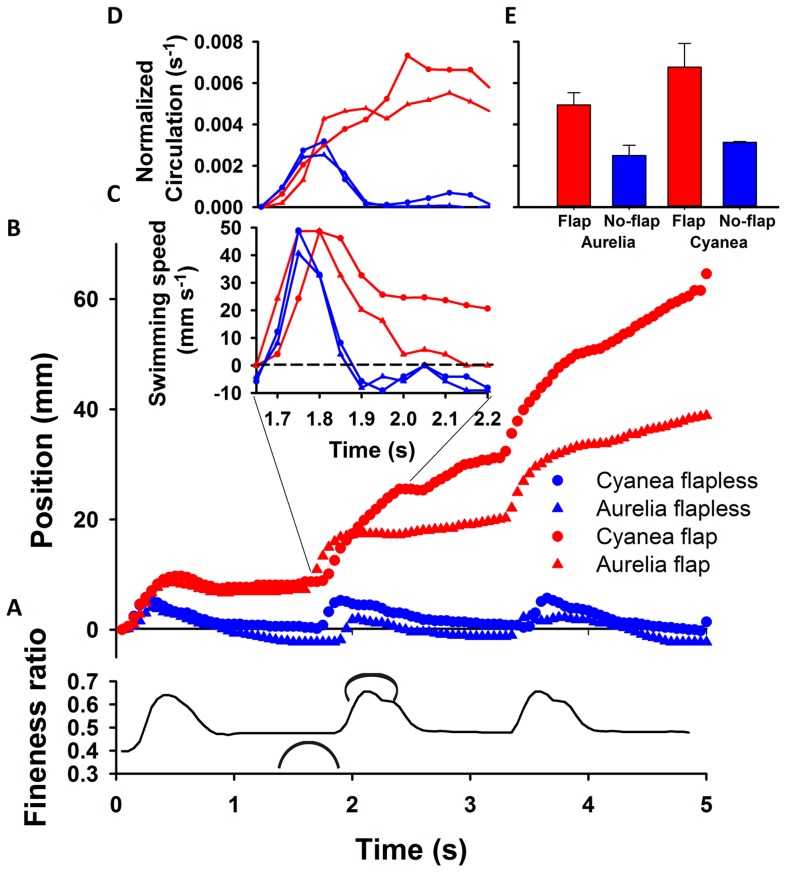
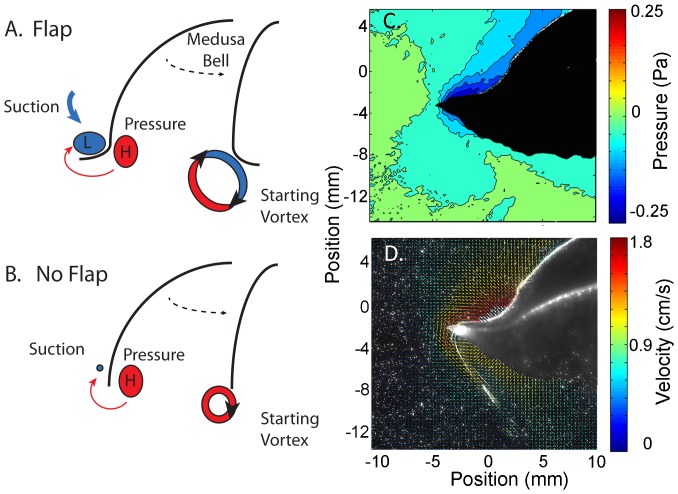
Flexible bell margins are characteristic components of rowing medusan morphologies and are expected to contribute towards their high propulsive efficiency. However, the mechanistic basis of thrust augmentation by flexible propulsors remained unresolved, so the impact of bell margin flexibility on medusan swimming has also remained unresolved. We used biomimetic robotic jellyfish vehicles to elucidate that propulsive thrust enhancement by flexible medusan bell margins relies upon fluid dynamic interactions between entrained flows at the inflexion point of the exumbrella and flows expelled from under the bell. Coalescence of flows from these two regions resulted in enhanced fluid circulation and, therefore, thrust augmentation for flexible margins of both medusan vehicles and living medusae. Using particle image velocimetry (PIV) data we estimated pressure fields to demonstrate a mechanistic basis of enhanced flows associated with the flexible bell margin. Performance of vehicles with flexible margins was further enhanced by vortex interactions that occur during bell expansion. Hydrodynamic and performance similarities between robotic vehicles and live animals demonstrated that the propulsive advantages of flexible margins found in nature can be emulated by human-engineered propulsors. Although medusae are simple animal models for description of this process, these results may contribute towards understanding the performance of flexible margins among other animal lineages.
柔性钟形缘是划船水母形态的典型组成部分,预计将有助于提高其高效的推进效率。然而,柔性推进器的推力增强的机械基础仍未解决,因此,钟形缘的灵活性对水母游泳的影响也仍未解决。我们使用仿生机器人水母车辆来阐明,柔性水母钟形缘的推进推力增强依赖于在伞的拐点处被卷入的流动和从钟形下排出的流动之间的流体动力学相互作用。来自这两个区域的流动的合并导致增强了流体循环,因此,柔性钟形缘的推力增强对于水母车辆和活体水母都适用。使用粒子图像测速(PIV)数据,我们估计了压力场,以证明与柔性钟形缘相关的增强流的机械基础。在钟形扩张期间发生的涡旋相互作用进一步提高了具有柔性缘的车辆的性能。机器人车辆和活体动物之间的水动力和性能相似性表明,在自然界中发现的柔性缘的推进优势可以通过人为设计的推进器来模拟。虽然水母是描述这一过程的简单动物模型,但这些结果可能有助于理解其他动物谱系中柔性缘的性能。