Centro De Automética y Robótica, UPM-CSIC, Madrid, Spain.
Sensors (Basel). 2013 Jan 21;13(1):1247-67. doi: 10.3390/s130101247.
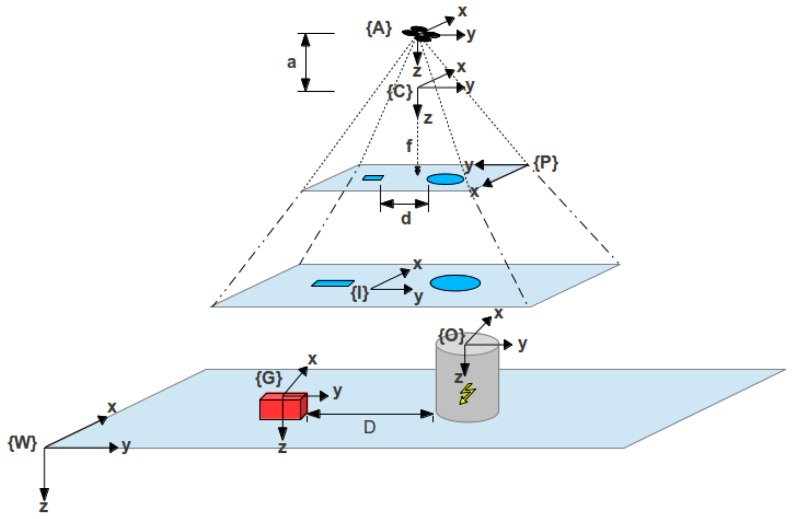
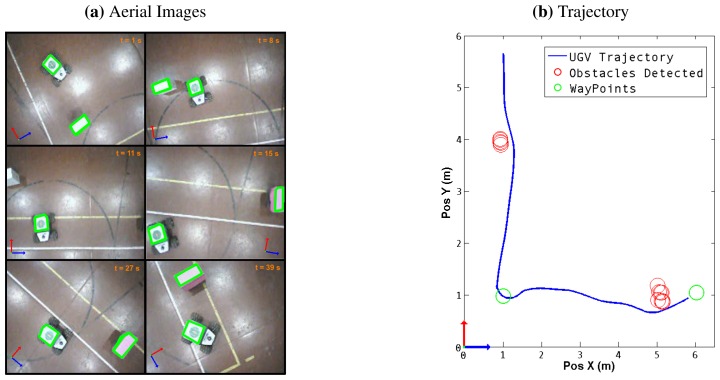
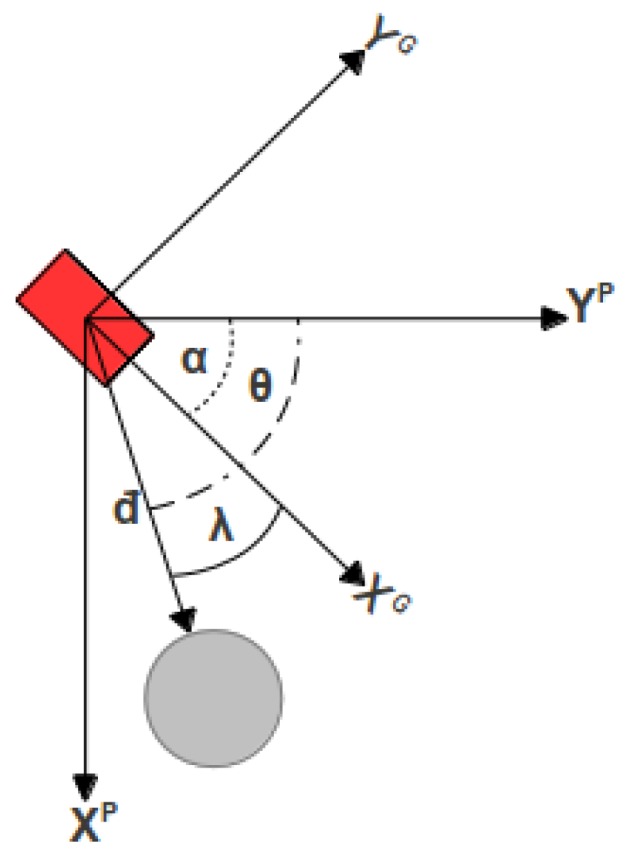
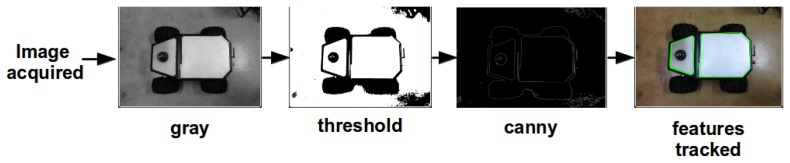
There are many outdoor robotic applications where a robot must reach a goal position or explore an area without previous knowledge of the environment around it. Additionally, other applications (like path planning) require the use of known maps or previous information of the environment. This work presents a system composed by a terrestrial and an aerial robot that cooperate and share sensor information in order to address those requirements. The ground robot is able to navigate in an unknown large environment aided by visual feedback from a camera on board the aerial robot. At the same time, the obstacles are mapped in real-time by putting together the information from the camera and the positioning system of the ground robot. A set of experiments were carried out with the purpose of verifying the system applicability. The experiments were performed in a simulation environment and outdoor with a medium-sized ground robot and a mini quad-rotor. The proposed robotic system shows outstanding results in simultaneous navigation and mapping applications in large outdoor environments.
有许多户外机器人应用场景,机器人必须到达目标位置或在不了解周围环境的情况下探索某个区域。此外,其他应用(如路径规划)需要使用已知地图或环境的先前信息。这项工作提出了一个由陆地机器人和空中机器人组成的系统,它们通过共享传感器信息来协作,以满足这些需求。地面机器人可以在未知的大环境中导航,其方法是借助搭载在空机器人上的摄像头提供的视觉反馈。同时,障碍物通过将摄像头和地面机器人定位系统的信息组合起来进行实时映射。进行了一组实验,目的是验证系统的适用性。实验是在模拟环境中和户外进行的,使用的是中型地面机器人和小型四旋翼飞行器。所提出的机器人系统在大型户外环境中的同时导航和映射应用中表现出色。