Division of Electronics & Electrical Engineering, Dongguk University-Seoul, Seoul 100-715, Korea.
Sensors (Basel). 2013 Aug 23;13(9):11314-35. doi: 10.3390/s130911314.
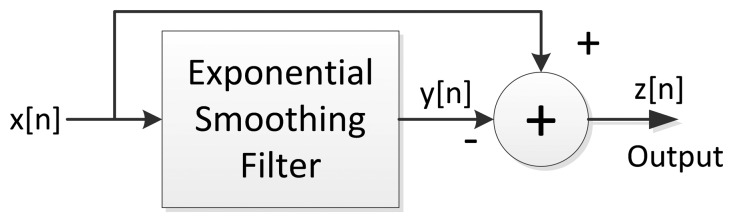
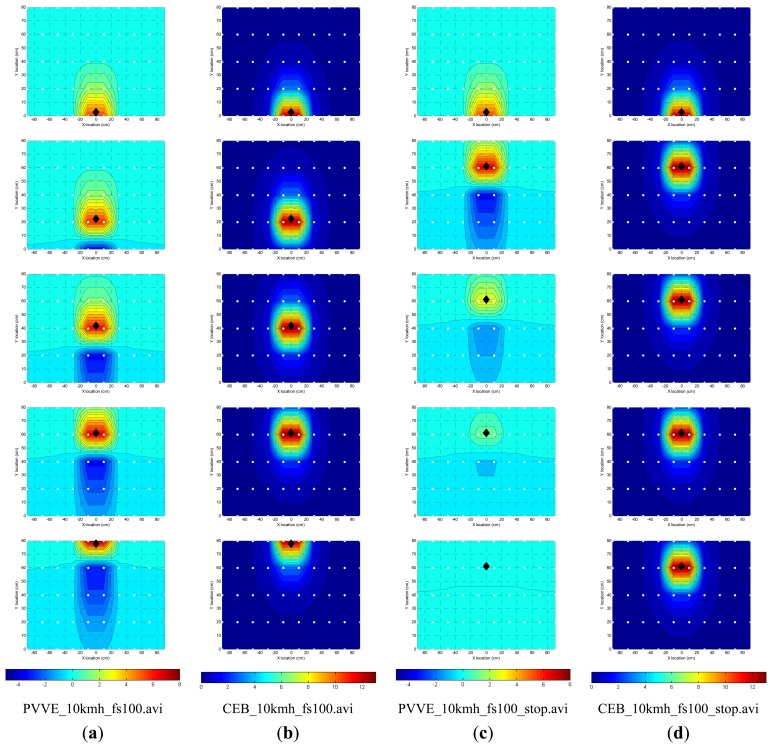
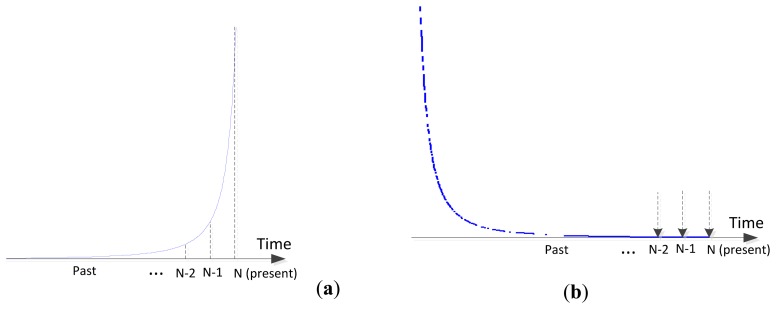
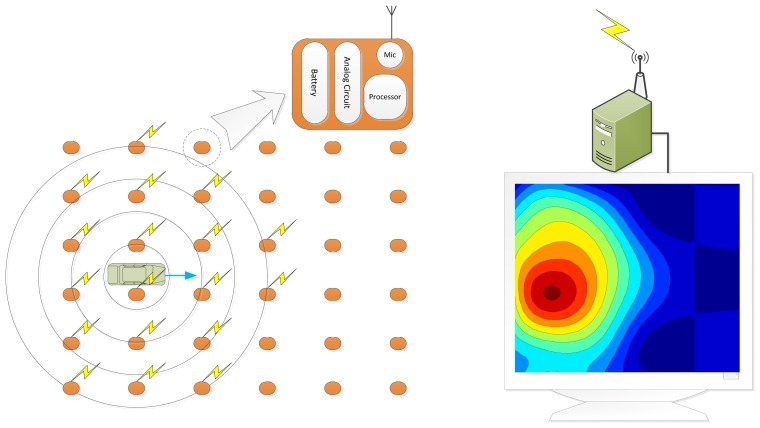
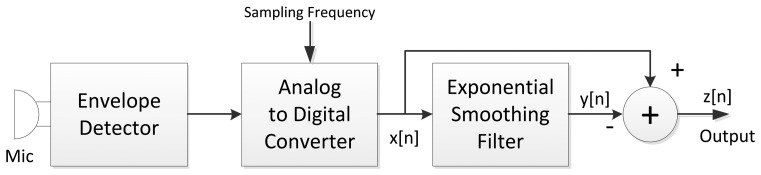
The generic properties of an acoustic signal provide numerous benefits for localization by applying energy-based methods over a deployed wireless sensor network (WSN). However, the signal generated by a stationary target utilizes a significant amount of bandwidth and power in the system without providing further position information. For vehicle localization, this paper proposes a novel proximity velocity vector estimator (PVVE) node architecture in order to capture the energy from a moving vehicle and reject the signal from motionless automobiles around the WSN node. A cascade structure between analog envelope detector and digital exponential smoothing filter presents the velocity vector-sensitive output with low analog circuit and digital computation complexity. The optimal parameters in the exponential smoothing filter are obtained by analytical and mathematical methods for maximum variation over the vehicle speed. For stationary targets, the derived simulation based on the acoustic field parameters demonstrates that the system significantly reduces the communication requirements with low complexity and can be expected to extend the operation time considerably.
声信号的通用属性通过在部署的无线传感器网络(WSN)上应用基于能量的方法,为定位提供了许多好处。然而,静止目标产生的信号在系统中会消耗大量带宽和功率,而不会提供进一步的位置信息。针对车辆定位,本文提出了一种新颖的近程速度矢量估计器(PVVE)节点架构,以便从移动车辆中捕获能量,并拒绝 WSN 节点周围静止汽车的信号。模拟包络检波器和数字指数平滑滤波器之间的级联结构提供了具有低模拟电路和数字计算复杂度的速度矢量敏感输出。指数平滑滤波器中的最优参数通过分析和数学方法获得,以在车辆速度上获得最大变化。对于静止目标,基于声场参数的推导仿真表明,该系统可以显著降低通信要求,同时保持低复杂度,并且有望大大延长系统的运行时间。