Liu Wen P, Reaugamornrat Sureerat, Deguet Anton, Sorger Jonathan M, Siewerdsen Jeffrey H, Richmon Jeremy, Taylor Russell H
Department of Computer Science, Johns Hopkins University.
Intuitive Surgical Inc., Sunnyvale, USA.
J Robot Surg. 2013 Sep;7(3):217-25. doi: 10.1007/s11701-013-0420-5.
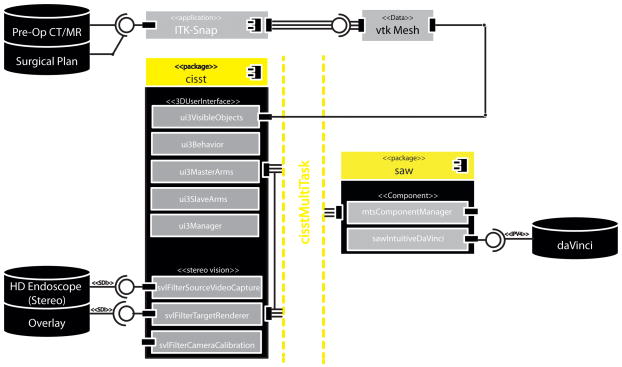
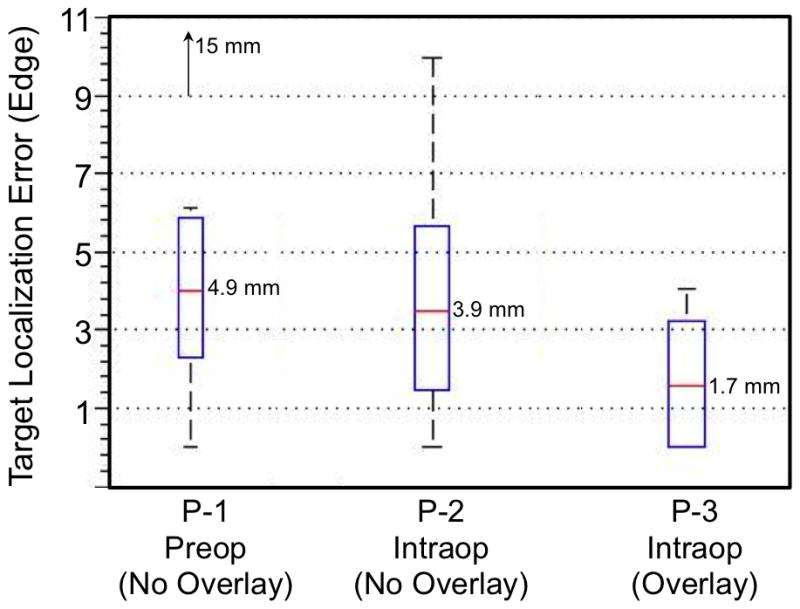
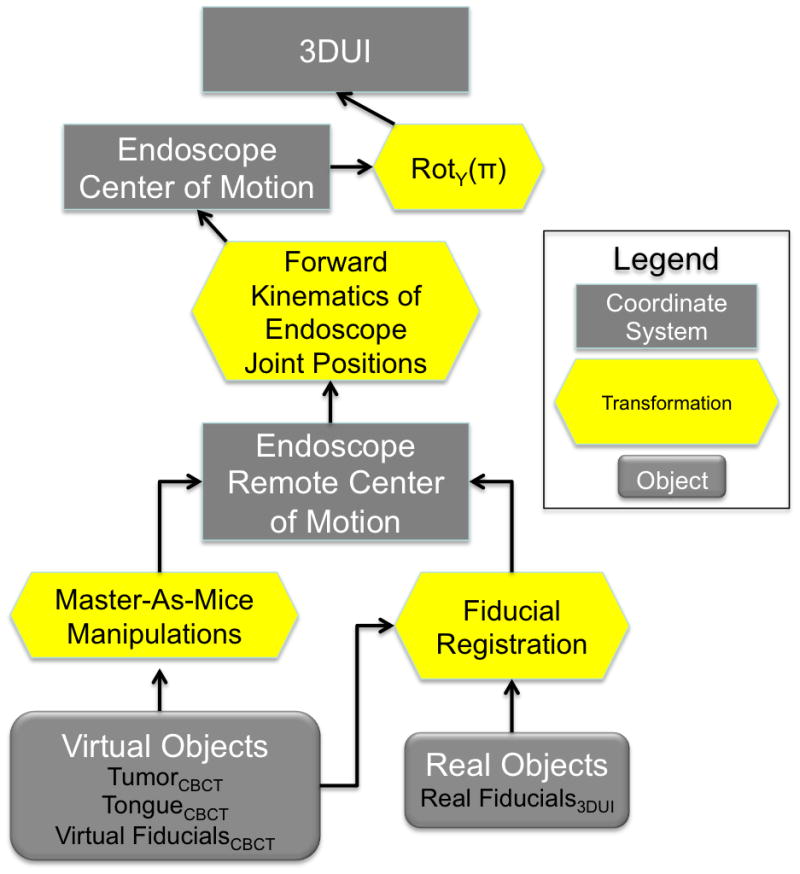
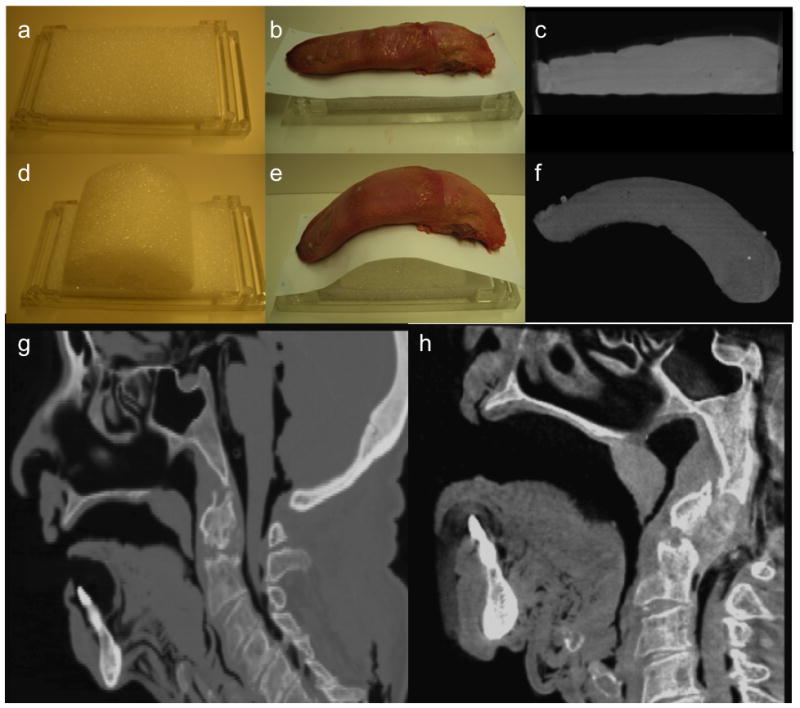
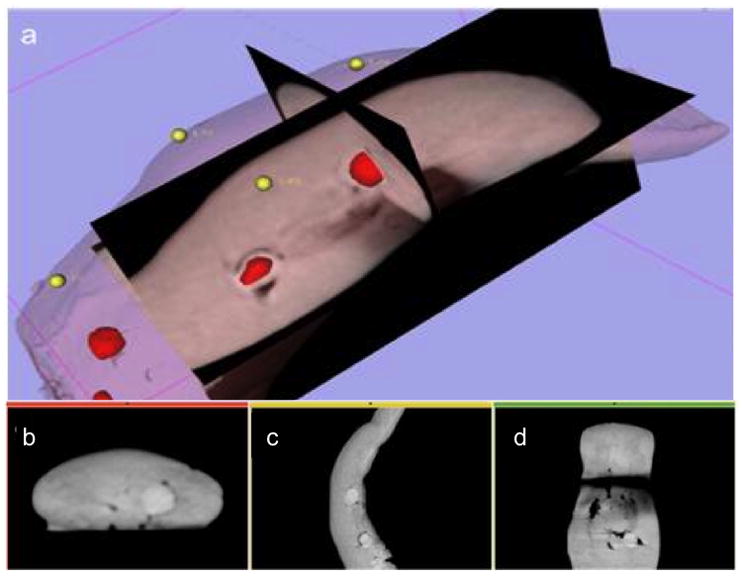
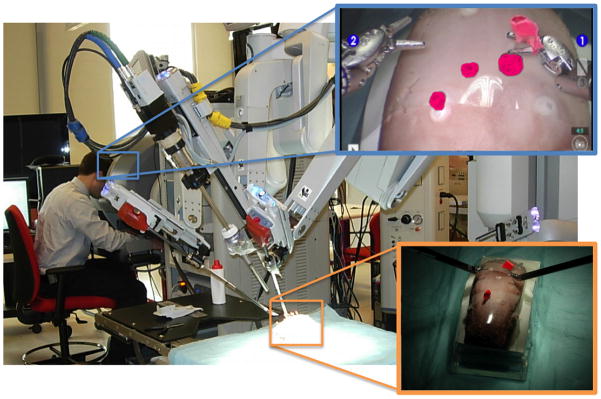
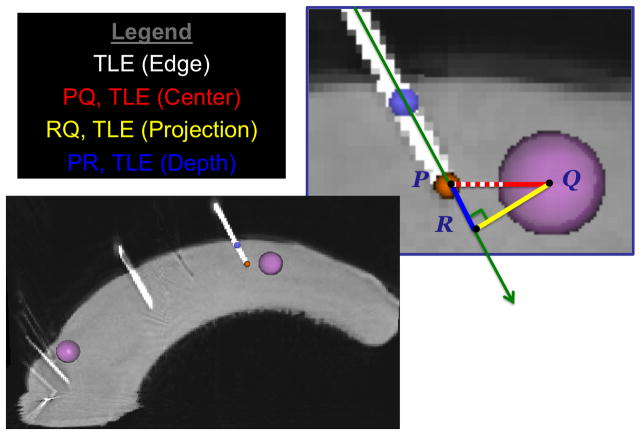
This paper presents the development and evaluation of video augmentation on the stereoscopic da Vinci S system with intraoperative image guidance for base of tongue tumor resection in transoral robotic surgery (TORS). Proposed workflow for image-guided TORS begins by identifying and segmenting critical oropharyngeal structures (e.g., the tumor and adjacent arteries and nerves) from preoperative computed tomography (CT) and/or magnetic resonance (MR) imaging. These preoperative planned data can be deformably registered to the intraoperative endoscopic view using mobile C-arm cone-beam computed tomography (CBCT) [1, 2]. Augmentation of TORS endoscopic video defining surgical targets and critical structures has the potential to improve navigation, spatial orientation, and confidence in tumor resection. Experiments in animal specimens achieved statistically significant improvement in target localization error when comparing the proposed image guidance system to simulated current practice.
本文介绍了在立体达芬奇S系统上进行视频增强的开发与评估,该系统用于经口机器人手术(TORS)中舌根部肿瘤切除的术中图像引导。图像引导TORS的建议工作流程始于从术前计算机断层扫描(CT)和/或磁共振(MR)成像中识别和分割关键的口咽结构(如肿瘤及相邻动脉和神经)。这些术前规划数据可使用移动C形臂锥形束计算机断层扫描(CBCT)[1,2]与术中内镜视图进行变形配准。增强TORS内镜视频以定义手术目标和关键结构,有可能改善导航、空间定向以及肿瘤切除的信心。在动物标本上进行的实验表明,将所提出的图像引导系统与模拟的当前实践进行比较时,目标定位误差有统计学意义的显著改善。