Rupp Rüdiger, Schließmann Daniel, Plewa Harry, Schuld Christian, Gerner Hans Jürgen, Weidner Norbert, Hofer Eberhard P, Knestel Markus
Heidelberg University Hospital, Spinal Cord Injury Center, Heidelberg, Germany.
Ulm University, Institute of Measurement, Control and Microtechnology, Ulm, Germany.
PLoS One. 2015 Mar 24;10(3):e0119167. doi: 10.1371/journal.pone.0119167. eCollection 2015.
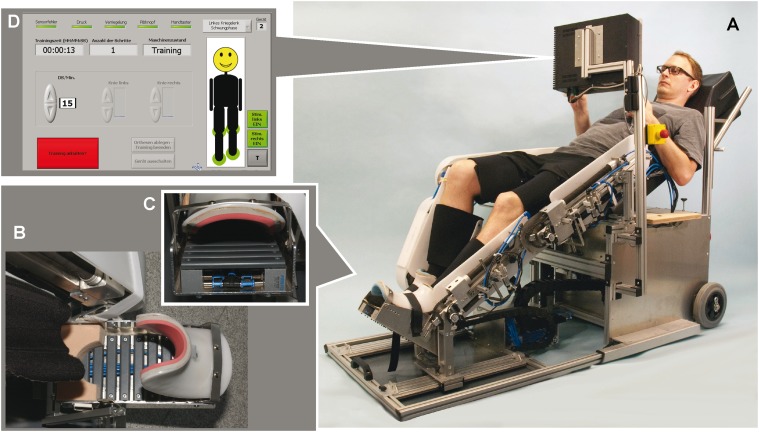
The compact Motorized orthosis for home rehabilitation of Gait (MoreGait) was developed for continuation of locomotion training at home. MoreGait generates afferent stimuli of walking with the user in a semi-supine position and provides feedback about deviations from the reference walking pattern.
Prospective, pre-post intervention, proof-of-concept study to test the feasibility of an unsupervised home-based application of five MoreGait prototypes in subjects with incomplete spinal cord injury (iSCI).
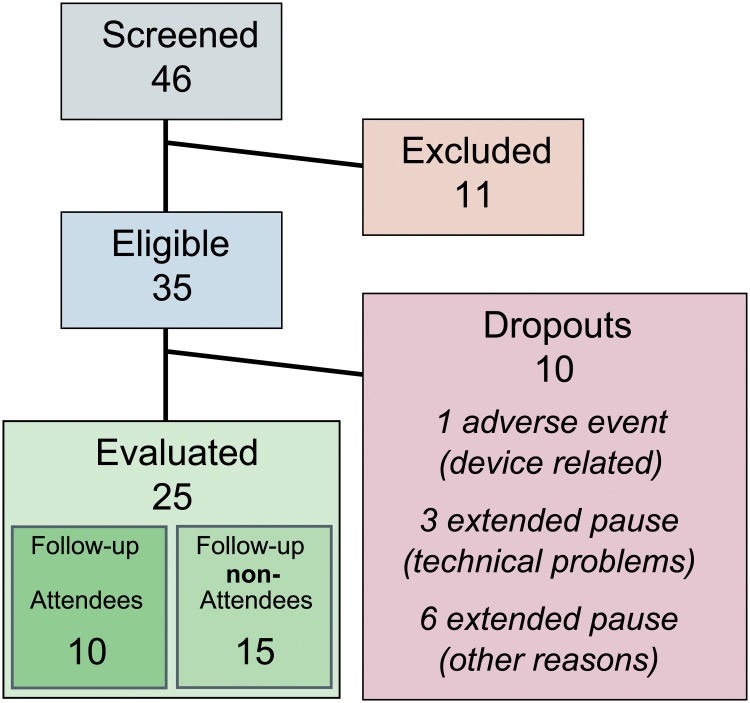
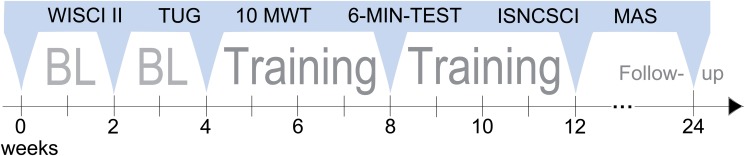
Twenty-five (5 tetraplegia, 20 paraplegia) participants with chronic (mean time since injury: 5.8 ± 5.4 (standard deviation, SD) years) sensorimotor iSCI (7 ASIA Impairment Scale (AIS) C, 18 AIS D; Walking Index for Spinal Cord Injury (WISCI II): Interquartile range 9 to 16) completed the training (45 minutes / day, at least 4 days / week, 8 weeks). Baseline status was documented 4 and 2 weeks before and at training onset. Training effects were assessed after 4 and 8 weeks of therapy.
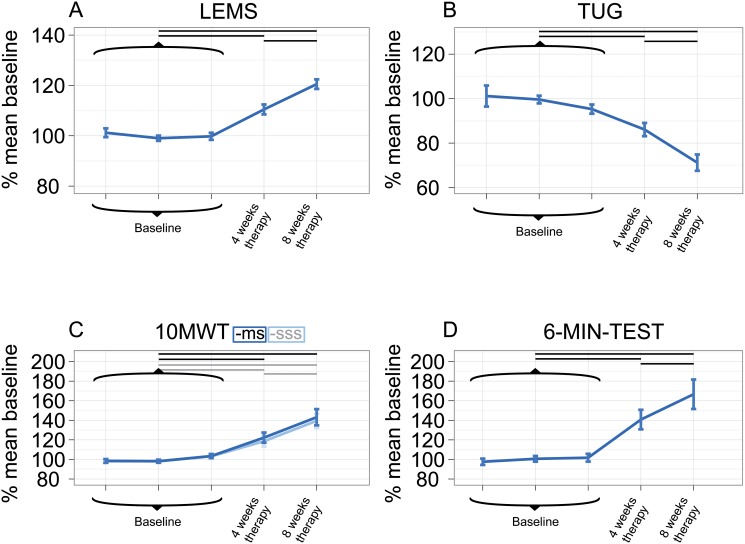
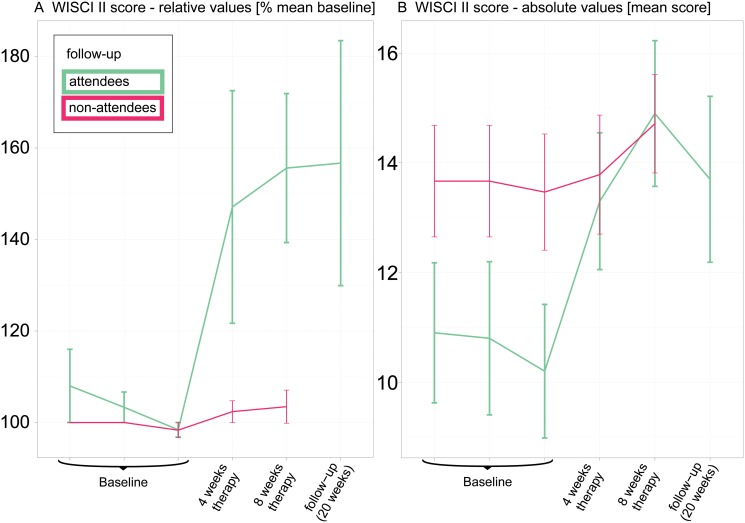
After therapy, 9 of 25 study participants improved with respect to the dependency on walking aids assessed by the WISCI II. For all individuals, the short-distance walking velocity measured by the 10-Meter Walk Test showed significant improvements compared to baseline (100%) for both self-selected (Mean 139.4% ± 35.5% (SD)) and maximum (Mean 143.1% ± 40.6% (SD)) speed conditions as well as the endurance estimated with the six-minute walk test (Mean 166.6% ± 72.1% (SD)). One device-related adverse event (pressure sore on the big toe) occurred in over 800 training sessions.
Home-based robotic locomotion training with MoreGait is feasible and safe. The magnitude of functional improvements achieved by MoreGait in individuals with iSCI is well within the range of complex locomotion robots used in hospitals. Thus, unsupervised MoreGait training potentially represents an option to prolong effective training aiming at recovery of locomotor function beyond in-patient rehabilitation.
German Clinical Trials Register (DKRS) DRKS00005587.
紧凑型家用步态康复电动矫形器(MoreGait)是为在家中继续进行运动训练而开发的。MoreGait能在使用者半仰卧位时产生行走的传入刺激,并提供与参考行走模式偏差的反馈。
进行前瞻性、干预前后对照的概念验证研究,以测试在不完全性脊髓损伤(iSCI)患者中无监督家庭应用五台MoreGait原型机的可行性。
25名(5例四肢瘫、20例截瘫)慢性(平均受伤时间:5.8±5.4(标准差,SD)年)感觉运动性iSCI患者(7例美国脊髓损伤协会损伤分级(AIS)C级、18例AIS D级;脊髓损伤步行指数(WISCI II):四分位间距9至16)完成了训练(每天45分钟,每周至少4天,共8周)。在训练开始前4周、2周以及训练开始时记录基线状态。在治疗4周和8周后评估训练效果。
治疗后,25名研究参与者中有9名在WISCI II评估的行走辅助依赖方面有所改善。对于所有个体,10米步行测试测量的短距离步行速度在自选(平均139.4%±35.5%(SD))和最大(平均143.1%±40.6%(SD))速度条件下与基线相比(100%)均有显著改善,以及6分钟步行测试估计的耐力(平均166.6%±72.1%(SD))。在超过800次训练中发生了1起与设备相关的不良事件(大脚趾压疮)。
使用MoreGait进行家庭机器人运动训练是可行且安全的。MoreGait在iSCI患者中实现的功能改善程度完全在医院使用的复杂运动机器人的范围内。因此,无监督MoreGait训练可能是延长有效训练的一种选择,旨在使运动功能恢复超出住院康复的范围。
德国临床试验注册中心(DKRS)DRKS00005587。