Zhang Heng, Liu Yanli, Tan Jindong
School of Information Engineering, East China Jiaotong University, Nanchang 330013, China.
Department of Mechanical, Aerospace and Biomedical Engineering, University of Tennessee, Knoxville, TN 37996, USA.
Sensors (Basel). 2015 Jun 19;15(6):14639-60. doi: 10.3390/s150614639.
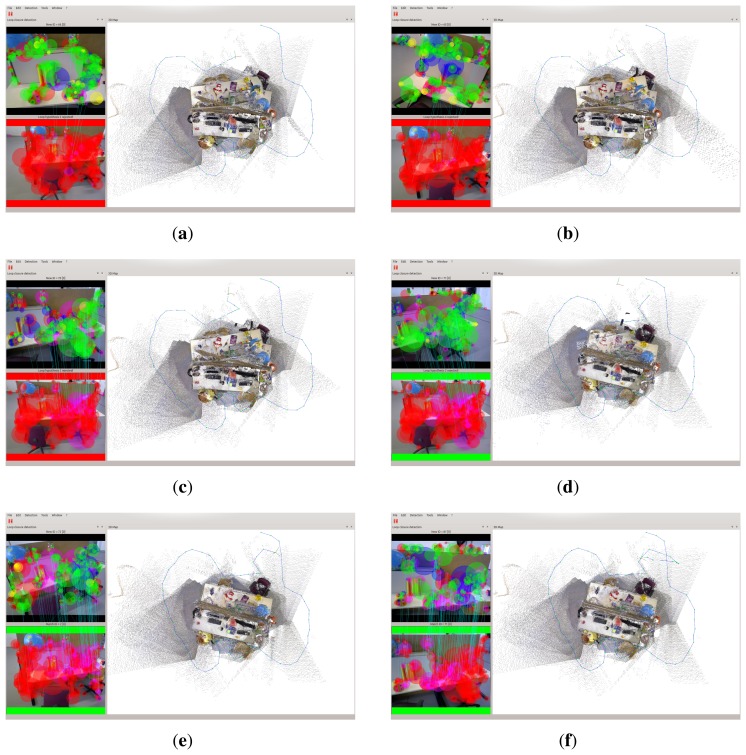
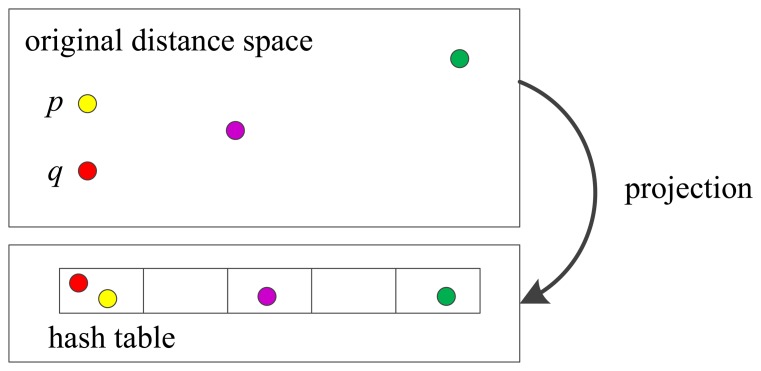
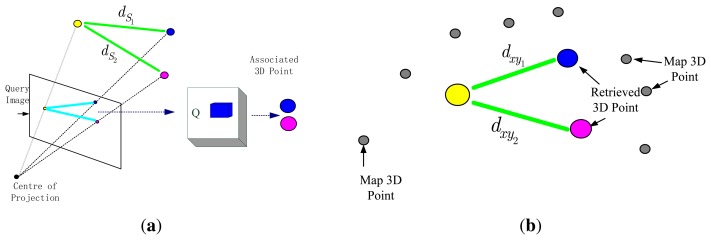
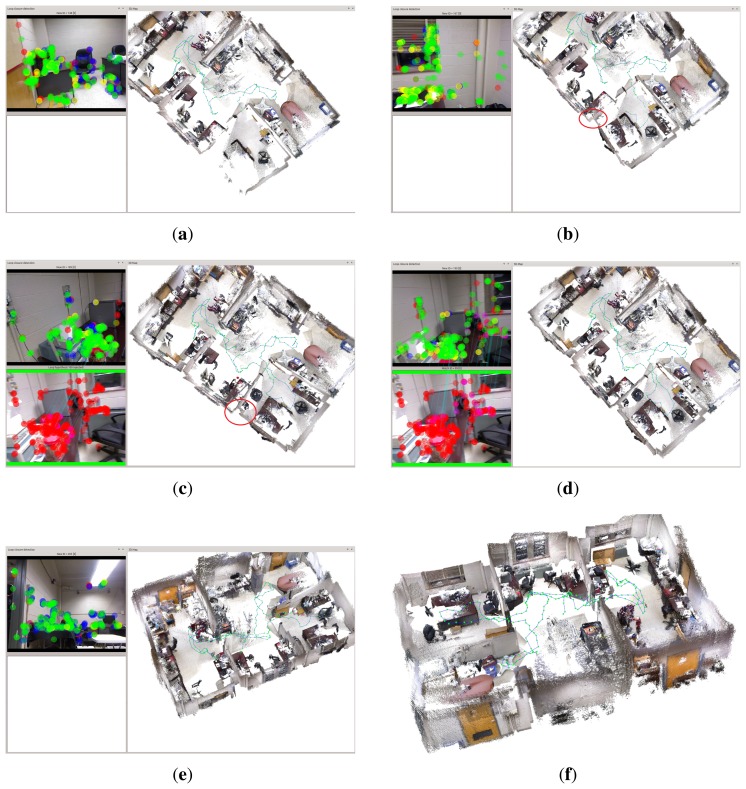
A kind of multi feature points matching algorithm fusing local geometric constraints is proposed for the purpose of quickly loop closing detection in RGB-D Simultaneous Localization and Mapping (SLAM). The visual feature is encoded with BRAND (binary robust appearance and normals descriptor), which efficiently combines appearance and geometric shape information from RGB-D images. Furthermore, the feature descriptors are stored using the Locality-Sensitive-Hashing (LSH) technique and hierarchical clustering trees are used to search for these binary features. Finally, the algorithm for matching of multi feature points using local geometric constraints is provided, which can effectively reject the possible false closure hypotheses. We demonstrate the efficiency of our algorithms by real-time RGB-D SLAM with loop closing detection in indoor image sequences taken with a handheld Kinect camera and comparative experiments using other algorithms in RTAB-Map dealing with a benchmark dataset.
为了在RGB-D同步定位与建图(SLAM)中快速进行回环检测,提出了一种融合局部几何约束的多特征点匹配算法。视觉特征采用BRAND(二进制鲁棒外观和法线描述符)进行编码,该描述符有效地结合了RGB-D图像中的外观和几何形状信息。此外,使用局部敏感哈希(LSH)技术存储特征描述符,并使用层次聚类树来搜索这些二进制特征。最后,提供了一种使用局部几何约束的多特征点匹配算法,该算法可以有效地排除可能的错误闭合假设。我们通过使用手持Kinect相机拍摄的室内图像序列进行实时RGB-D SLAM回环检测以及在RTAB-Map中使用其他算法处理基准数据集的对比实验,证明了我们算法的有效性。