Bush Nicholas E, Schroeder Christopher L, Hobbs Jennifer A, Yang Anne Et, Huet Lucie A, Solla Sara A, Hartmann Mitra Jz
Interdepartmental Neuroscience Program, Northwestern University, Evanston, United States.
Department of Biomedical Engineering, Northwestern University, Evanston, United States.
Elife. 2016 Jun 27;5:e13969. doi: 10.7554/eLife.13969.
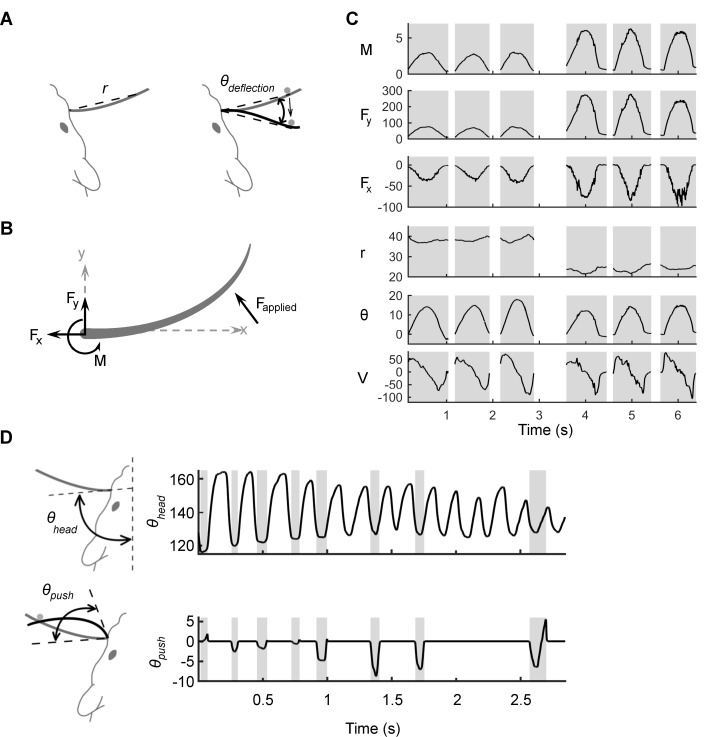
Tactile information available to the rat vibrissal system begins as external forces that cause whisker deformations, which in turn excite mechanoreceptors in the follicle. Despite the fundamental mechanical origin of tactile information, primary sensory neurons in the trigeminal ganglion (Vg) have often been described as encoding the kinematics (geometry) of object contact. Here we aimed to determine the extent to which Vg neurons encode the kinematics vs. mechanics of contact. We used models of whisker bending to quantify mechanical signals (forces and moments) at the whisker base while simultaneously monitoring whisker kinematics and recording single Vg units in both anesthetized rats and awake, body restrained rats. We employed a novel manual stimulation technique to deflect whiskers in a way that decouples kinematics from mechanics, and used Generalized Linear Models (GLMs) to show that Vg neurons more directly encode mechanical signals when the whisker is deflected in this decoupled stimulus space.
大鼠触须系统可获取的触觉信息始于导致触须变形的外力,这些外力进而刺激毛囊中的机械感受器。尽管触觉信息具有基本的机械起源,但三叉神经节(Vg)中的初级感觉神经元常被描述为对物体接触的运动学(几何形状)进行编码。在这里,我们旨在确定Vg神经元对接触的运动学与力学进行编码的程度。我们使用触须弯曲模型来量化触须基部的机械信号(力和力矩),同时监测触须运动学,并在麻醉大鼠和清醒、身体受限的大鼠中记录单个Vg神经元。我们采用了一种新颖的手动刺激技术,以使触须偏转的方式将运动学与力学解耦,并使用广义线性模型(GLMs)表明,当触须在这种解耦的刺激空间中偏转时,Vg神经元更直接地编码机械信号。