Cha Youngsu, Hong Jin, Lee Jaemin, Park Jung-Min, Kim Keehoon
Center for Robotics Research, Korea Institute of Science and Technology, Seoul 02792, Korea.
School of Mechanical Engineering, Korea University, Seoul 02841, Korea.
Sensors (Basel). 2016 Jul 6;16(7):1045. doi: 10.3390/s16071045.
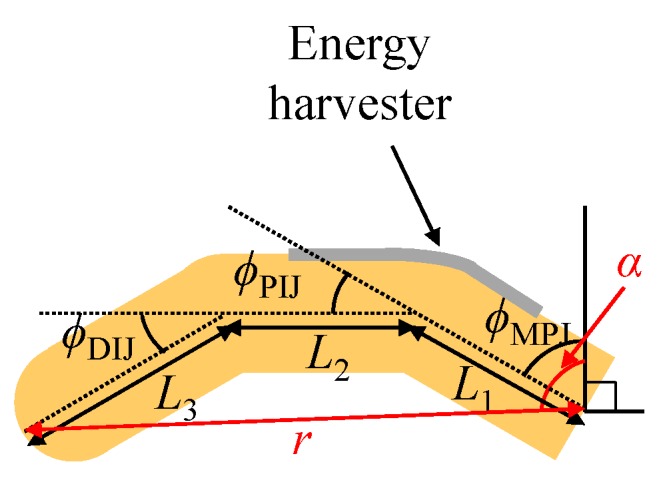
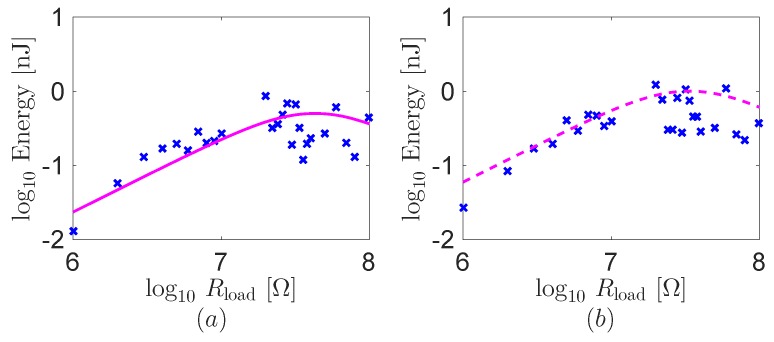
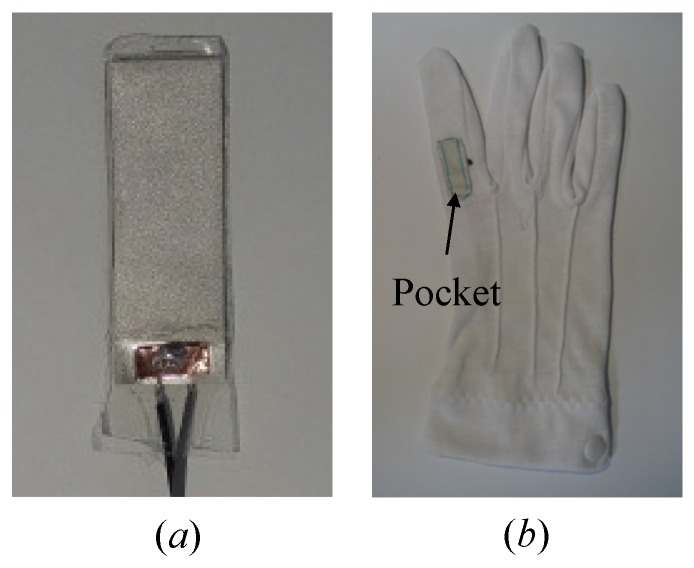
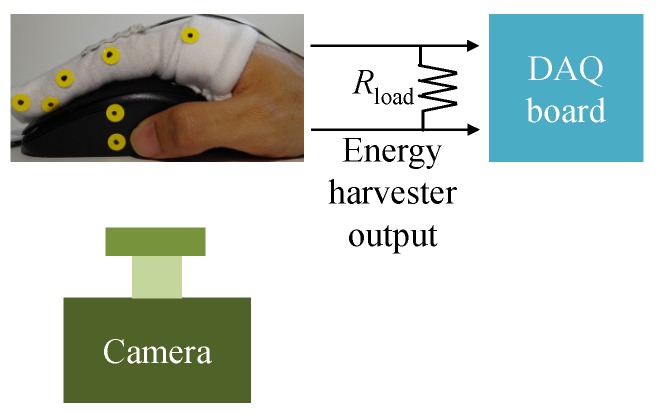
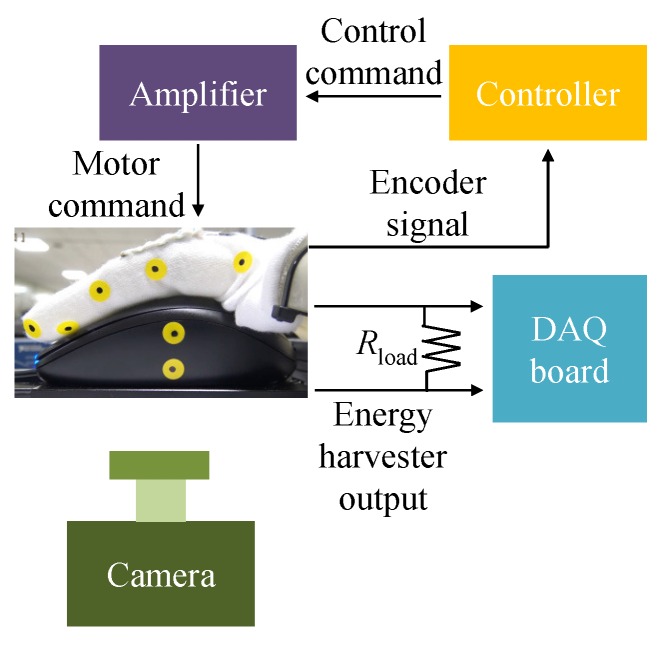
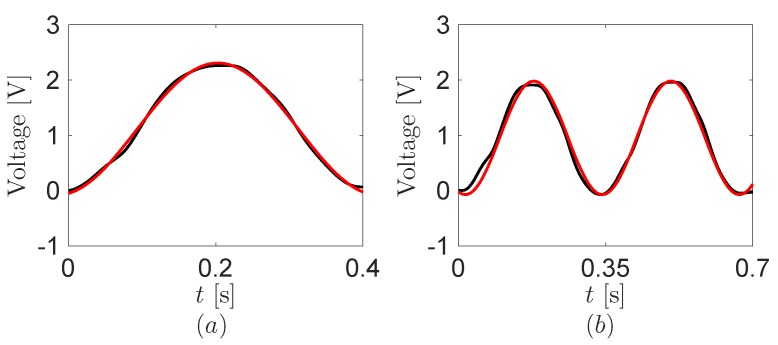
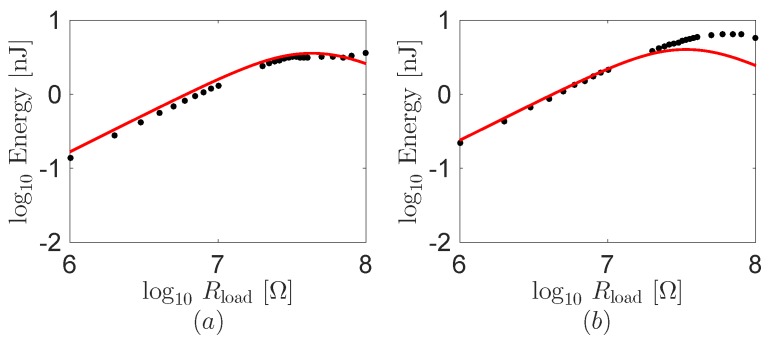
In this paper, we study energy harvesting from the mouse click motions of a robot finger and a human index finger using a piezoelectric material. The feasibility of energy harvesting from mouse click motions is experimentally and theoretically assessed. The fingers wear a glove with a pocket for including the piezoelectric material. We model the energy harvesting system through the inverse kinematic framework of parallel joints in a finger and the electromechanical coupling equations of the piezoelectric material. The model is validated through energy harvesting experiments in the robot and human fingers with the systematically varying load resistance. We find that energy harvesting is maximized at the matched load resistance to the impedance of the piezoelectric material, and the harvested energy level is tens of nJ.
在本文中,我们研究了利用压电材料从机器人手指和人类食指的点击动作中收集能量。通过实验和理论评估了从点击动作中收集能量的可行性。手指佩戴带有用于容纳压电材料口袋的手套。我们通过手指中平行关节的逆运动学框架和压电材料的机电耦合方程对能量收集系统进行建模。通过在机器人手指和人类手指上进行的能量收集实验,在系统地改变负载电阻的情况下对该模型进行了验证。我们发现,在与压电材料阻抗匹配的负载电阻下能量收集最大化,并且收集到的能量水平为数十纳焦。