Rafii-Tari Hedyeh, Payne Christopher J, Bicknell Colin, Kwok Ka-Wai, Cheshire Nicholas J W, Riga Celia, Yang Guang-Zhong
The Hamlyn Centre for Robotic Surgery, Imperial College London, Level 4, Bessemer Building, South Kensington Campus, London, SW7 2AZ, UK.
Academic Division of Surgery, Imperial College London, London, UK.
Ann Biomed Eng. 2017 May;45(5):1315-1327. doi: 10.1007/s10439-017-1791-y. Epub 2017 Feb 8.
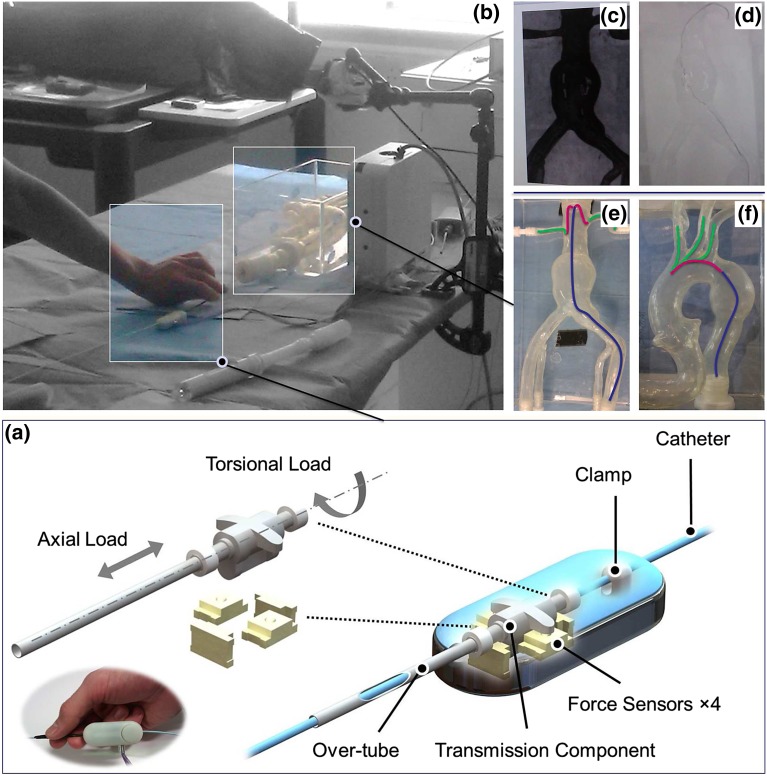
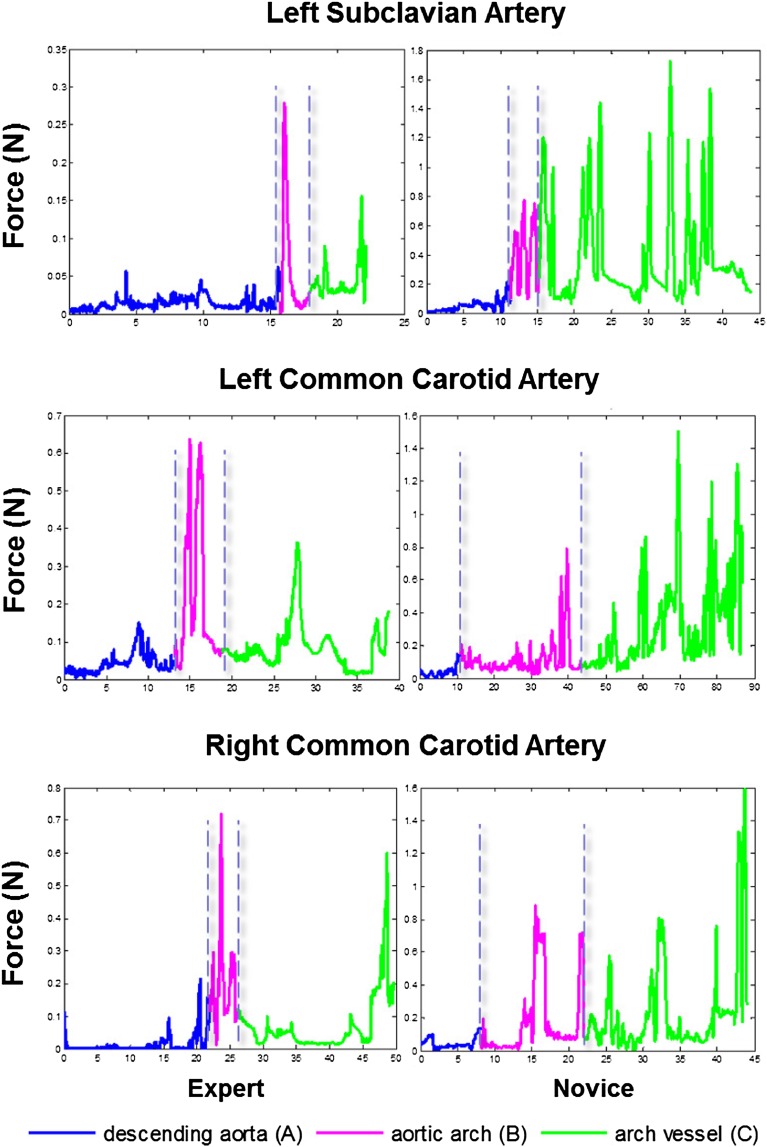
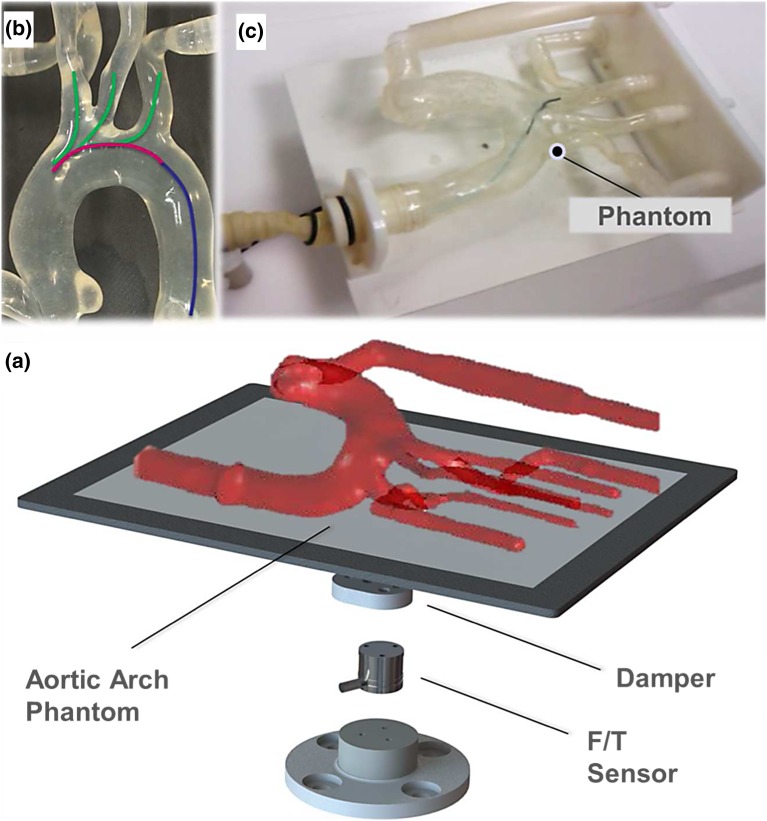
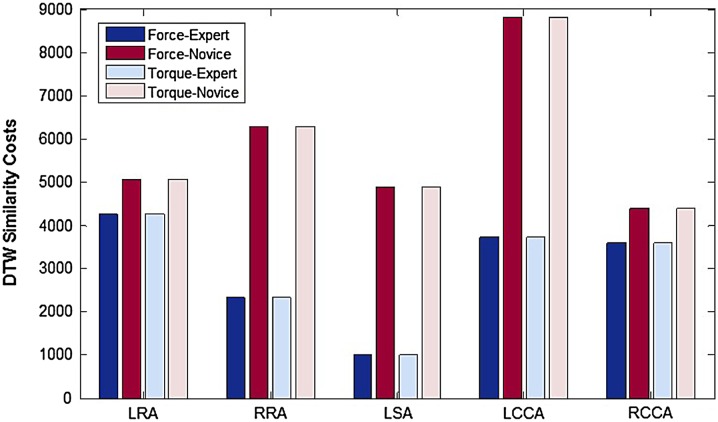
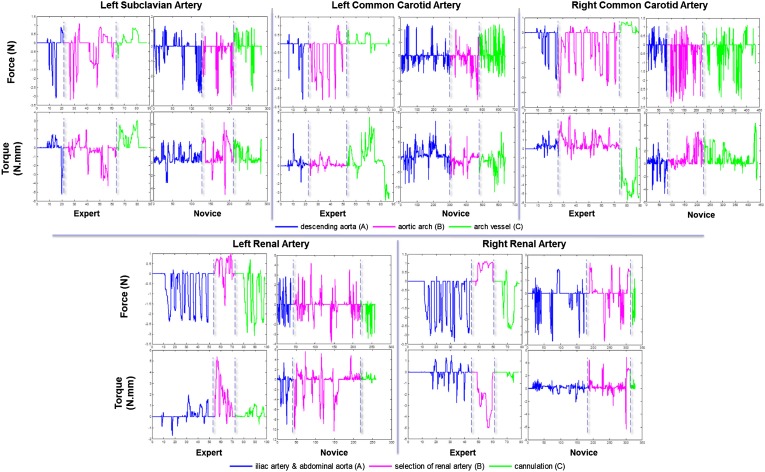
Despite the increasing popularity of endovascular intervention in clinical practice, there remains a lack of objective and quantitative metrics for skill evaluation of endovascular techniques. Data relating to the forces exerted during endovascular procedures and the behavioral patterns of endovascular clinicians is currently limited. This research proposes two platforms for measuring tool forces applied by operators and contact forces resulting from catheter-tissue interactions, as a means of providing accurate, objective metrics of operator skill within a realistic simulation environment. Operator manipulation patterns are compared across different experience levels performing various complex catheterization tasks, and different performance metrics relating to tool forces, catheter motion dynamics, and forces exerted on the vasculature are extracted. The results depict significant differences between the two experience groups in their force and motion patterns across different phases of the procedures, with support vector machine (SVM) classification showing cross-validation accuracies as high as 90% between the two skill levels. This is the first robust study, validated across a large pool of endovascular specialists, to present objective measures of endovascular skill based on exerted forces. The study also provides significant insights into the design of optimized metrics for improved training and performance assessment of catheterization tasks.
尽管血管内介入治疗在临床实践中越来越受欢迎,但对于血管内技术的技能评估仍缺乏客观和定量的指标。目前,关于血管内手术过程中施加的力以及血管内临床医生行为模式的数据有限。本研究提出了两个平台,用于测量操作者施加的工具力以及导管与组织相互作用产生的接触力,作为在逼真模拟环境中提供操作者技能准确、客观指标的一种手段。比较了不同经验水平的操作者在执行各种复杂导管插入任务时的操作模式,并提取了与工具力、导管运动动力学以及血管上施加的力相关的不同性能指标。结果表明,两个经验组在手术不同阶段的力和运动模式存在显著差异,支持向量机(SVM)分类显示两个技能水平之间的交叉验证准确率高达90%。这是第一项在大量血管内专家中得到验证的有力研究,旨在基于施加的力提出血管内技能的客观测量方法。该研究还为优化指标的设计提供了重要见解,以改进导管插入任务的培训和性能评估。