Huynh Phat, Do Trong-Hop, Yoo Myungsik
School of Electronic Engineering, Soongsil University, Seoul 06978, Korea.
Sensors (Basel). 2017 Feb 10;17(2):347. doi: 10.3390/s17020347.
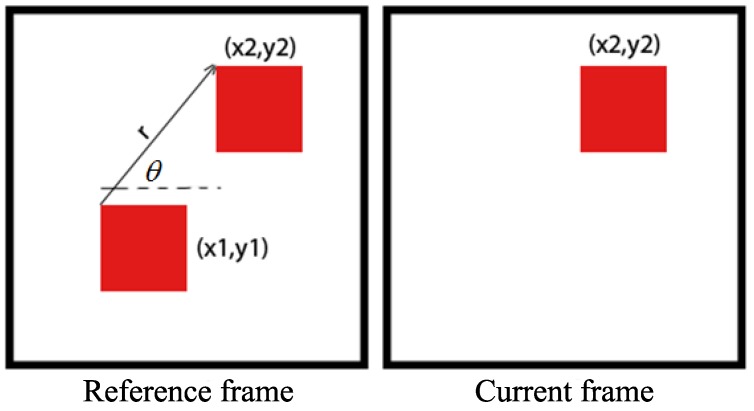
This paper proposes a probability-based algorithm to track the LED in vehicle visible light communication systems using a camera. In this system, the transmitters are the vehicles' front and rear LED lights. The receivers are high speed cameras that take a series of images of the LEDs. ThedataembeddedinthelightisextractedbyfirstdetectingthepositionoftheLEDsintheseimages. Traditionally, LEDs are detected according to pixel intensity. However, when the vehicle is moving, motion blur occurs in the LED images, making it difficult to detect the LEDs. Particularly at high speeds, some frames are blurred at a high degree, which makes it impossible to detect the LED as well as extract the information embedded in these frames. The proposed algorithm relies not only on the pixel intensity, but also on the optical flow of the LEDs and on statistical information obtained from previous frames. Based on this information, the conditional probability that a pixel belongs to a LED is calculated. Then, the position of LED is determined based on this probability. To verify the suitability of the proposed algorithm, simulations are conducted by considering the incidents that can happen in a real-world situation, including a change in the position of the LEDs at each frame, as well as motion blur due to the vehicle speed.
本文提出了一种基于概率的算法,用于在车辆可见光通信系统中使用摄像头跟踪发光二极管(LED)。在该系统中,发射器是车辆的前后LED灯。接收器是高速摄像头,用于拍摄LED的一系列图像。通过首先检测这些图像中LED的位置来提取光中嵌入的数据。传统上,根据像素强度检测LED。然而,当车辆行驶时,LED图像中会出现运动模糊,导致难以检测到LED。特别是在高速行驶时,一些帧会出现高度模糊,这使得无法检测到LED以及提取这些帧中嵌入的信息。所提出的算法不仅依赖于像素强度,还依赖于LED的光流以及从前一帧获得的统计信息。基于这些信息,计算像素属于LED的条件概率。然后,根据该概率确定LED的位置。为了验证所提出算法的适用性,通过考虑现实世界中可能发生的情况进行了模拟,包括每一帧中LED位置的变化以及由于车速导致的运动模糊。