Mao Aihua, Zhang Hong, Liu Yuxin, Zheng Yinglong, Li Guiqing, Han Guoqiang
School of Computer Science & Engineering, South China University of Technology, Guangzhou 510006, China.
Sensors (Basel). 2017 May 12;17(5):1113. doi: 10.3390/s17051113.
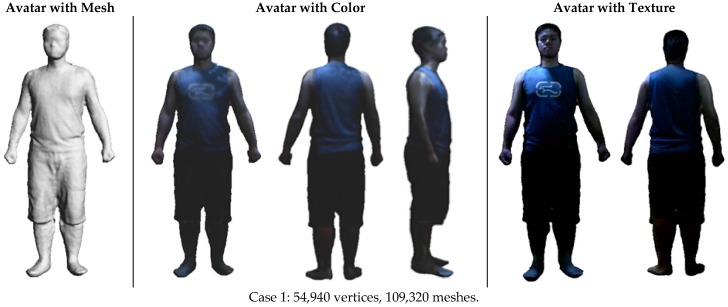
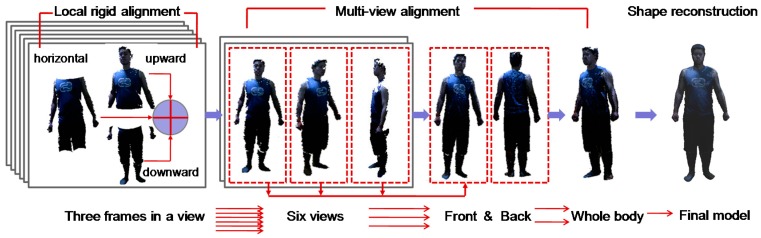
This paper proposes a new easy and fast 3D avatar reconstruction method using an RGB-D sensor. Users can easily implement human body scanning and modeling just with a personal computer and a single RGB-D sensor such as a Microsoft Kinect within a small workspace in their home or office. To make the reconstruction of 3D avatars easy and fast, a new data capture strategy is proposed for efficient human body scanning, which captures only 18 frames from six views with a close scanning distance to fully cover the body; meanwhile, efficient alignment algorithms are presented to locally align the data frames in the single view and then globally align them in multi-views based on pairwise correspondence. In this method, we do not adopt shape priors or subdivision tools to synthesize the model, which helps to reduce modeling complexity. Experimental results indicate that this method can obtain accurate reconstructed 3D avatar models, and the running performance is faster than that of similar work. This research offers a useful tool for the manufacturers to quickly and economically create 3D avatars for products design, entertainment and online shopping.
本文提出了一种使用RGB-D传感器的新型简单快速的3D头像重建方法。用户只需一台个人电脑和一个RGB-D传感器(如微软Kinect),就能在家庭或办公室的小工作空间内轻松实现人体扫描和建模。为了使3D头像的重建变得简单快速,提出了一种新的数据捕获策略用于高效的人体扫描,该策略从六个视图以近距离扫描仅捕获18帧以完全覆盖身体;同时,提出了高效的对齐算法,先在单视图中局部对齐数据帧,然后基于成对对应在多视图中全局对齐它们。在该方法中,我们不采用形状先验或细分工具来合成模型,这有助于降低建模复杂性。实验结果表明,该方法能够获得准确的重建3D头像模型,并且运行性能比类似工作更快。这项研究为制造商提供了一个有用的工具,以便快速且经济地创建用于产品设计、娱乐和在线购物的3D头像。