Hammad Mohanad M, Elshenawy Ahmed K, El Singaby M I
Electrical and Control Engineering, Arab Academy for Science, Technology and Maritime Transport, Alexandria, Egypt.
PLoS One. 2017 Jul 6;12(7):e0179611. doi: 10.1371/journal.pone.0179611. eCollection 2017.
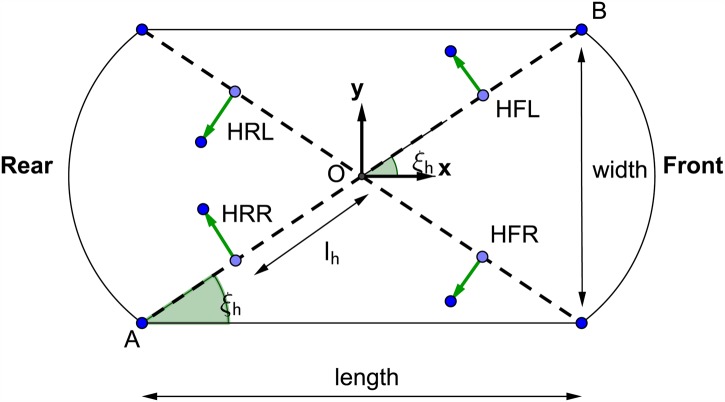
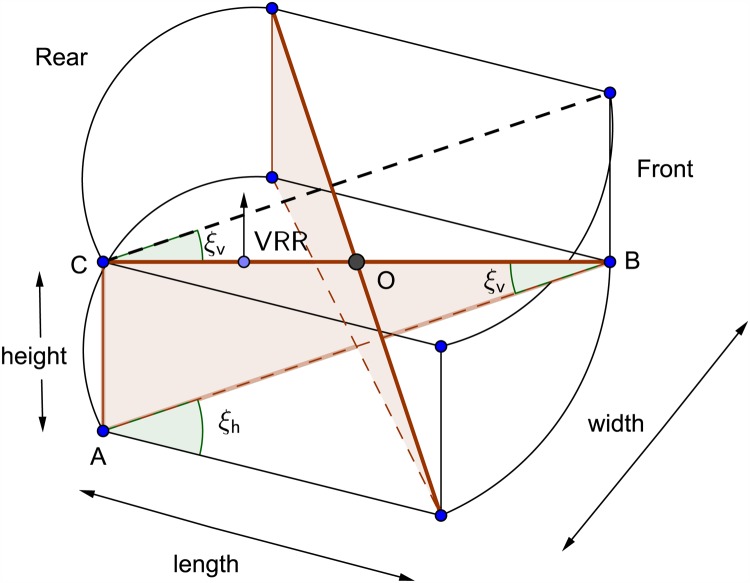
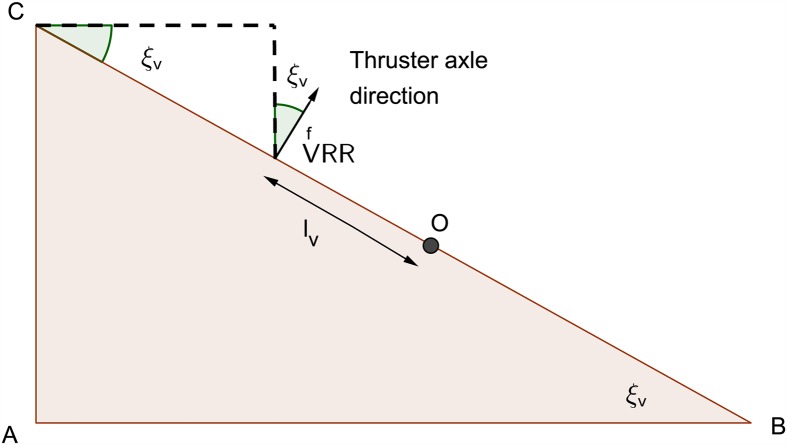
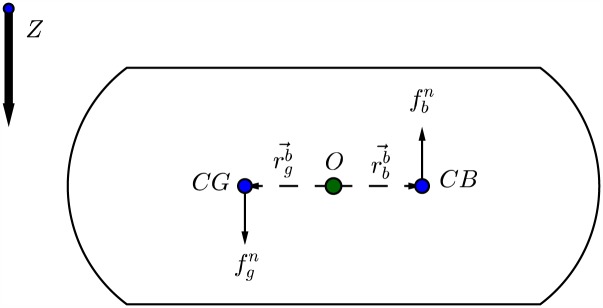
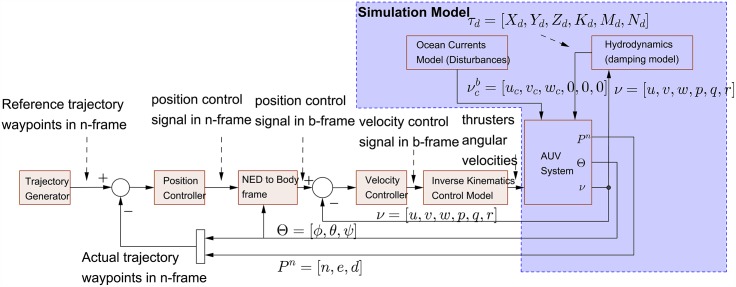
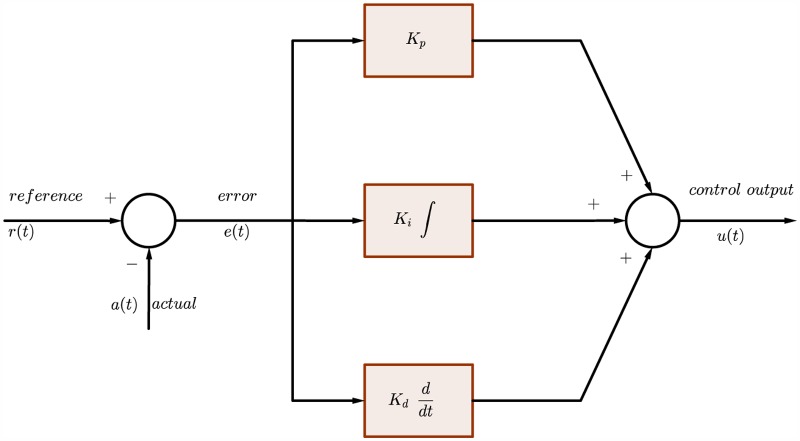
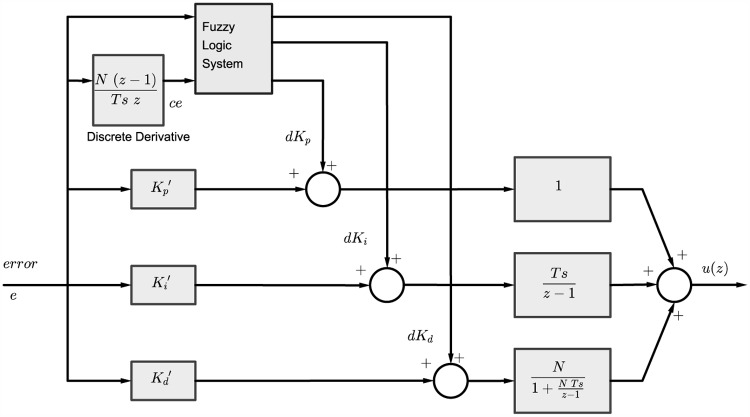
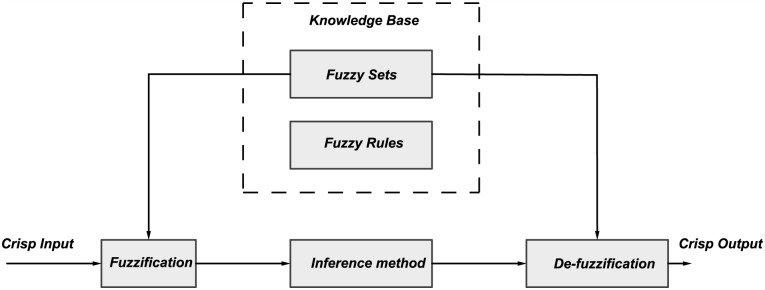
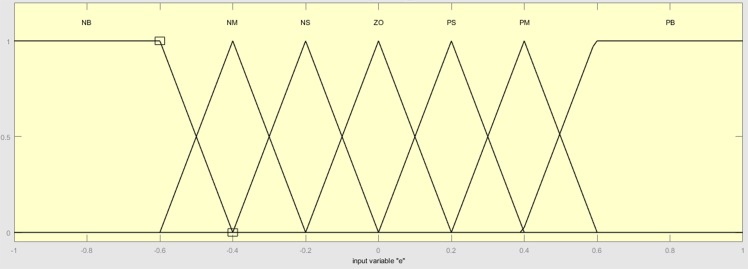
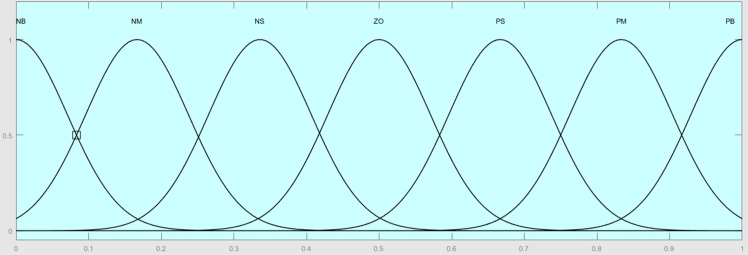
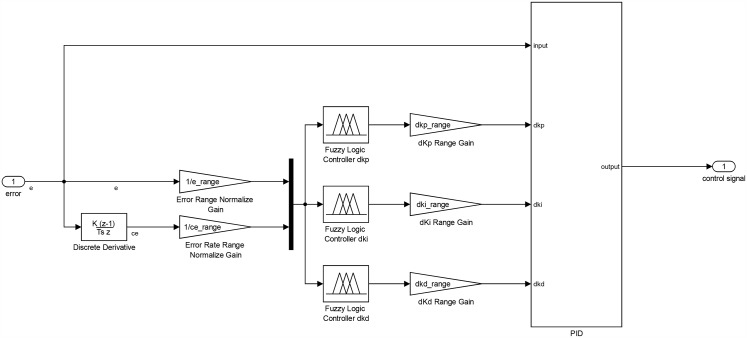
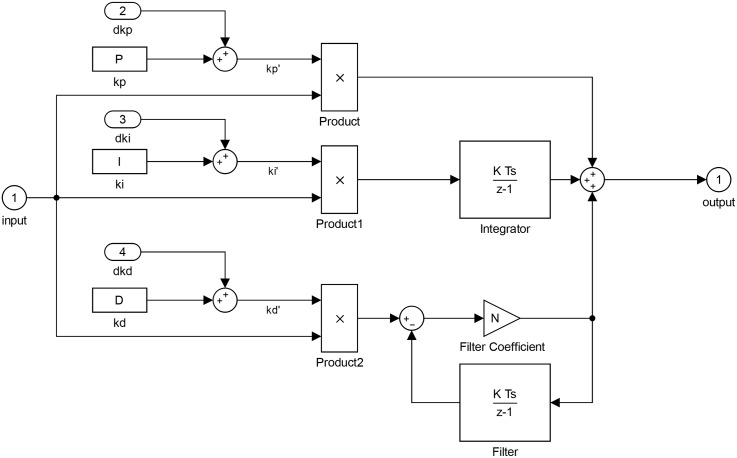
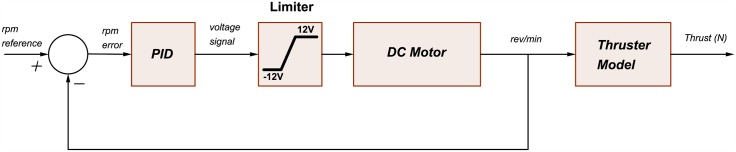
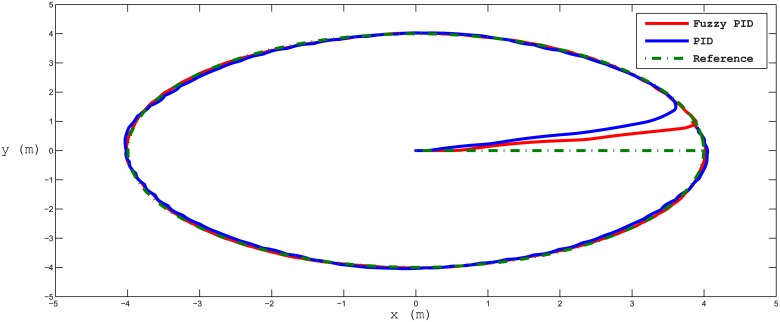
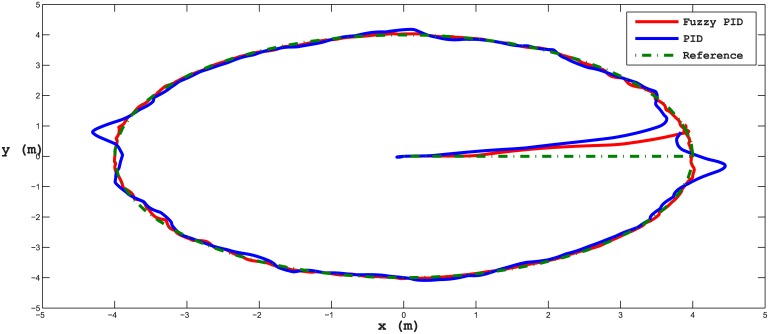
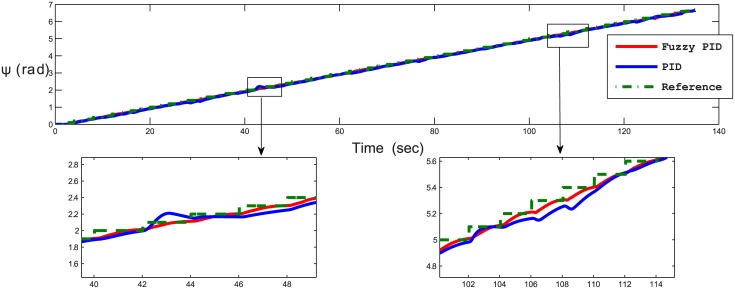
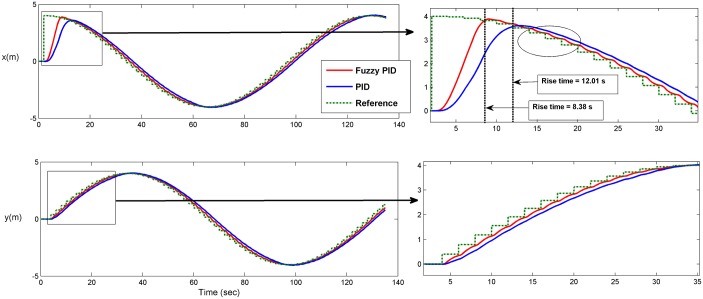
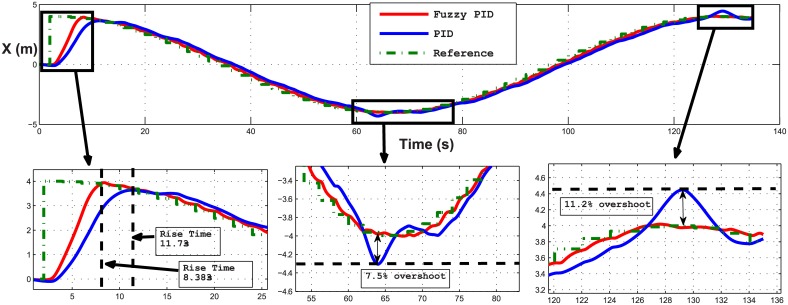
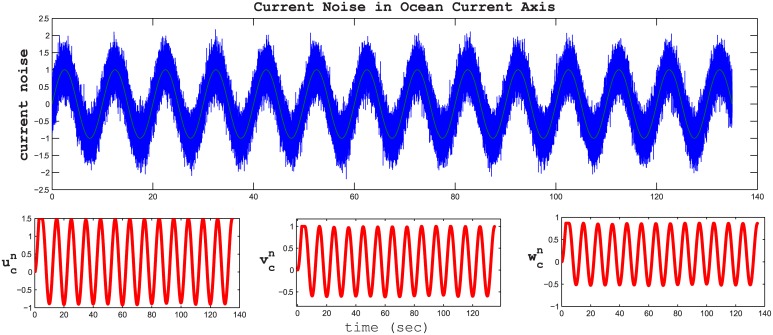
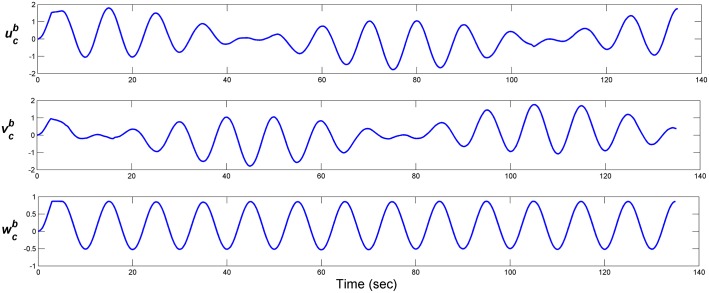
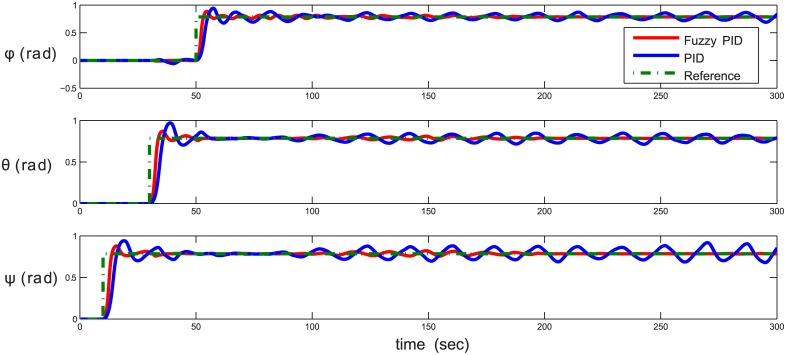
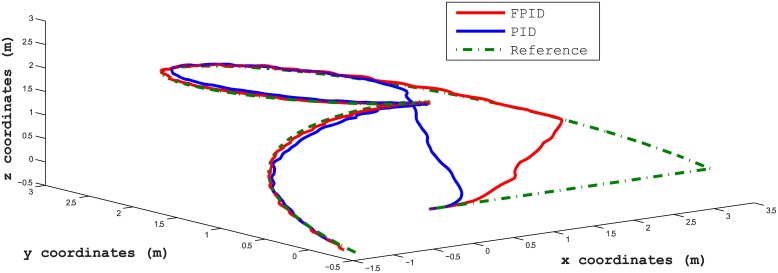
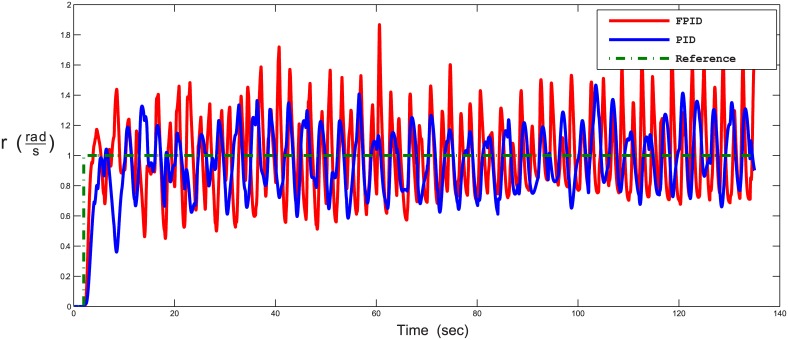
In this work a design for self-tuning non-linear Fuzzy Proportional Integral Derivative (FPID) controller is presented to control position and speed of Multiple Input Multiple Output (MIMO) fully-actuated Autonomous Underwater Vehicles (AUV) to follow desired trajectories. Non-linearity that results from the hydrodynamics and the coupled AUV dynamics makes the design of a stable controller a very difficult task. In this study, the control scheme in a simulation environment is validated using dynamic and kinematic equations for the AUV model and hydrodynamic damping equations. An AUV configuration with eight thrusters and an inverse kinematic model from a previous work is utilized in the simulation. In the proposed controller, Mamdani fuzzy rules are used to tune the parameters of the PID. Nonlinear fuzzy Gaussian membership functions are selected to give better performance and response in the non-linear system. A control architecture with two feedback loops is designed such that the inner loop is for velocity control and outer loop is for position control. Several test scenarios are executed to validate the controller performance including different complex trajectories with and without injection of ocean current disturbances. A comparison between the proposed FPID controller and the conventional PID controller is studied and shows that the FPID controller has a faster response to the reference signal and more stable behavior in a disturbed non-linear environment.
在这项工作中,提出了一种自整定非线性模糊比例积分微分(FPID)控制器的设计,用于控制多输入多输出(MIMO)全驱动自主水下航行器(AUV)的位置和速度,使其跟踪期望轨迹。水动力和耦合的AUV动力学所导致的非线性使得设计一个稳定的控制器成为一项非常困难的任务。在本研究中,使用AUV模型的动力学和运动学方程以及水动力阻尼方程,在仿真环境中验证了控制方案。在仿真中采用了具有八个推进器的AUV配置和先前工作中的逆运动学模型。在所提出的控制器中,使用Mamdani模糊规则来调整PID的参数。选择非线性模糊高斯隶属函数,以便在非线性系统中获得更好的性能和响应。设计了一种具有两个反馈回路的控制架构,使得内环用于速度控制,外环用于位置控制。执行了几个测试场景来验证控制器性能,包括有和没有注入洋流干扰的不同复杂轨迹。研究了所提出的FPID控制器与传统PID控制器之间的比较,结果表明,FPID控制器对参考信号的响应更快,并且在受干扰的非线性环境中具有更稳定的行为。