Wu Xiong, Jiang Du, Yun Juntong, Liu Xin, Sun Ying, Tao Bo, Tong Xiliang, Xu Manman, Kong Jianyi, Liu Ying, Zhao Guojun, Fang Zifan
Key Laboratory of Metallurgical Equipment and Control Technology of Ministry of Education, Wuhan University of Science and Technology, Wuhan, China.
Research Center for Biomimetic Robot and Intelligent Measurement and Control, Wuhan University of Science and Technology, Wuhan, China.
Front Bioeng Biotechnol. 2022 Feb 28;10:843020. doi: 10.3389/fbioe.2022.843020. eCollection 2022.
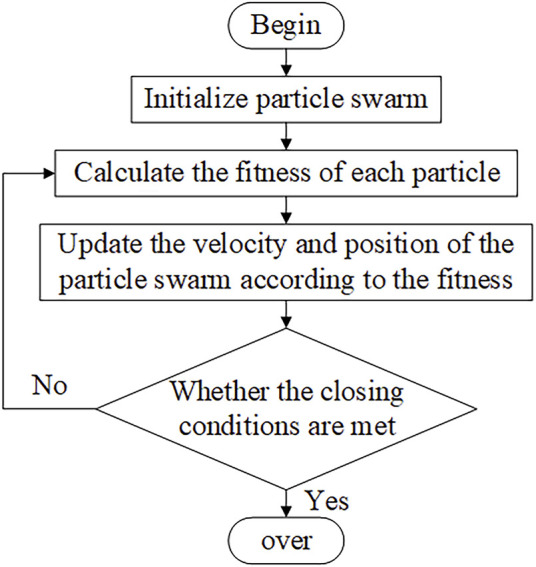
Autonomous Underwater Vehicle are widely used in industries, such as marine resource exploitation and fish farming, but they are often subject to a large amount of interference which cause poor control stability, while performing their tasks. A decoupling control algorithm is proposed and A single control volume-single attitude angle model is constructed for the problem of severe coupling in the control system of attitude of six degrees of freedom Autonomous Underwater Vehicle. Aiming at the problem of complex Active Disturbance Rejection Control (ADRC) adjustment relying on manual experience, the PSO-ADRC algorithm is proposed to realize the automatic adjustment of its parameters, which improves the anti-interference ability and control accuracy of Autonomous Underwater Vehicle in dynamic environment. The anti-interference ability and control accuracy of the method were verified through experiments.
自主水下航行器在海洋资源开发和养鱼等行业中得到广泛应用,但在执行任务时,它们经常受到大量干扰,导致控制稳定性较差。针对六自由度自主水下航行器姿态控制系统中严重耦合的问题,提出了一种解耦控制算法,并构建了单控制量-单姿态角模型。针对主动干扰抑制控制(ADRC)调整复杂且依赖人工经验的问题,提出了粒子群优化-主动干扰抑制控制(PSO-ADRC)算法来实现其参数的自动调整,提高了自主水下航行器在动态环境中的抗干扰能力和控制精度。通过实验验证了该方法的抗干扰能力和控制精度。