Aurich-Schuler Tabea, Grob Fabienne, van Hedel Hubertus J A, Labruyère Rob
Rehabilitation Center Affoltern am Albis, Children's University Hospital Zurich, Muehlebergstrasse 104, CH-8910, Affoltern am Albis, Switzerland.
Children's Research Center, Children's University Hospital Zurich, Steinwiesstrasse 75, CH-8032, Zurich, Switzerland.
J Neuroeng Rehabil. 2017 Jul 14;14(1):76. doi: 10.1186/s12984-017-0287-1.
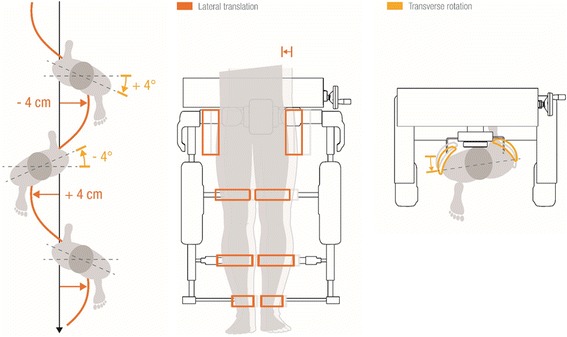
Robot-assisted gait therapy is increasingly being used in pediatric neurorehabilitation to complement conventional physical therapy. The robotic device applied in this study, the Lokomat (Hocoma AG, Switzerland), uses a position control mode (Guidance Force), where exact positions of the knee and hip joints throughout the gait cycle are stipulated. Such a mode has two disadvantages: Movement variability is restricted, and patients tend to walk passively. Kinematic variability and active participation, however, are crucial for motor learning. Recently, two new control modes were introduced. The Path Control mode allows the patient to walk within a virtual tunnel surrounding the ideal movement trajectory. The FreeD was developed to support weight shifting through mediolaterally moveable pelvis and leg cuffs. The aims of this study were twofold: 1) To present an overview of the currently available control modes of the Lokomat. 2) To evaluate if an increase in kinematic variability as provided by the new control modes influenced leg muscle activation patterns and intensity, as well as heart rate while walking in the Lokomat.
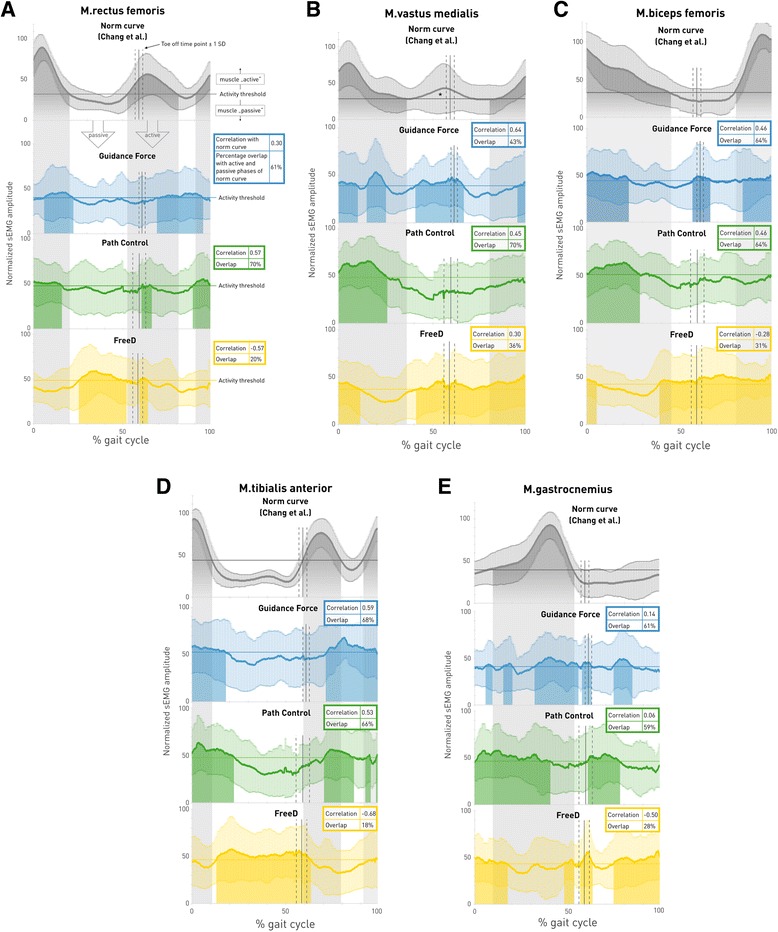
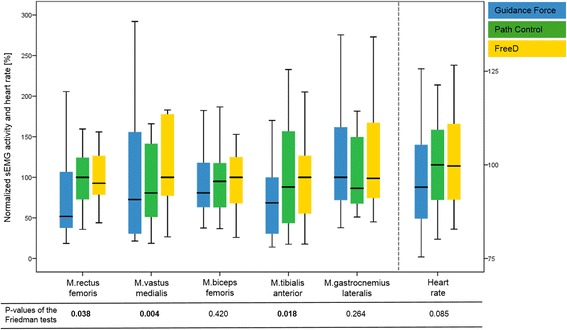
In 15 adolescents with neurological gait disorders who walked in the Lokomat, 3 conditions were compared: Guidance Force, Path Control, and FreeD. We analyzed surface electromyographic (sEMG) activity from 5 leg muscles of the more affected leg and heart rate. Muscle activation patterns were compared with norm curves.
Several muscles, as well as heart rate, demonstrated tendencies towards a higher activation during conditions with more kinematic freedom. sEMG activation patterns of the M.rectus femoris and M.vastus medialis showed the highest similarity to over-ground walking under Path Control, whereas walking under FreeD led to unphysiological muscle activation in the tested sample.
Results indicate that especially Path Control seems promising for adolescent patients undergoing neurorehabilitation, as it increases proximal leg muscle activity while facilitating a physiological muscle activation. Therefore, this may be a solution to increase kinematic variability and patients' active participation in robot-assisted gait training.
机器人辅助步态治疗在儿科神经康复中越来越多地被用于补充传统物理治疗。本研究中应用的机器人设备Lokomat(瑞士Hocoma AG公司)采用位置控制模式(引导力模式),该模式规定了整个步态周期中膝关节和髋关节的确切位置。这种模式有两个缺点:运动变异性受到限制,患者倾向于被动行走。然而,运动学变异性和主动参与对于运动学习至关重要。最近,引入了两种新的控制模式。路径控制模式允许患者在围绕理想运动轨迹的虚拟隧道内行走。FreeD模式的开发是为了通过可在内外侧移动的骨盆和腿部袖带支持体重转移。本研究的目的有两个:1)概述Lokomat目前可用的控制模式。2)评估新控制模式所提供的运动学变异性增加是否会影响在Lokomat中行走时腿部肌肉的激活模式和强度以及心率。
对15名患有神经步态障碍的青少年在Lokomat中行走的三种情况进行比较:引导力模式、路径控制模式和FreeD模式。我们分析了受影响较重一侧的5块腿部肌肉的表面肌电图(sEMG)活动和心率。将肌肉激活模式与正常曲线进行比较。
在运动自由度更高的情况下,几块肌肉以及心率均表现出更高激活的趋势。股直肌和股内侧肌的sEMG激活模式在路径控制模式下与地面行走最为相似,而在FreeD模式下行走导致测试样本中肌肉出现非生理性激活。
结果表明,特别是路径控制模式对于接受神经康复治疗的青少年患者似乎很有前景,因为它增加了近端腿部肌肉活动,同时促进了生理性肌肉激活。因此,这可能是增加运动学变异性和患者在机器人辅助步态训练中主动参与度的一种解决方案。