Yan Li, Tan Junxiang, Liu Hua, Xie Hong, Chen Changjun
School of Geodesy and Geomatics, Wuhan University, Luoyu Road 129, Wuhan 430079, China.
Sensors (Basel). 2017 Aug 29;17(9):1979. doi: 10.3390/s17091979.
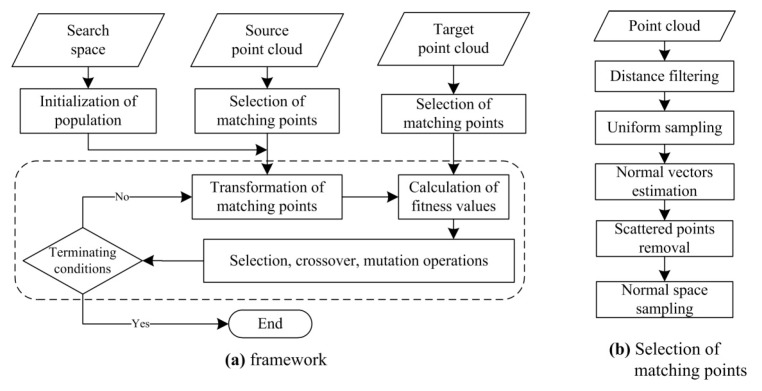
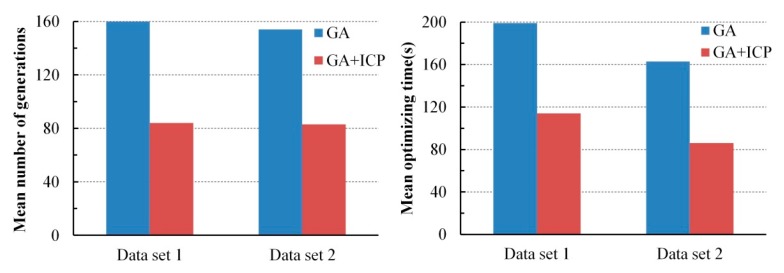
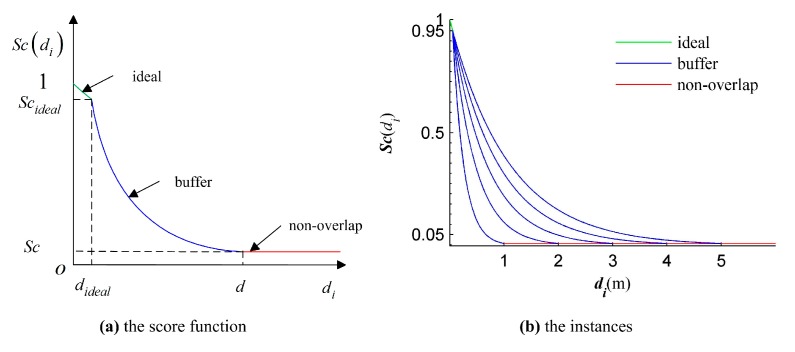
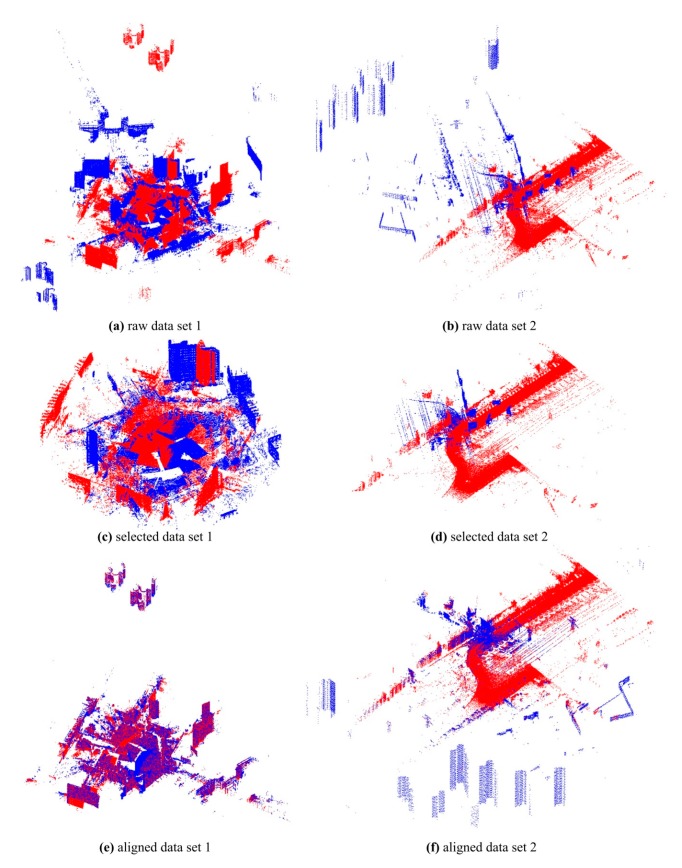
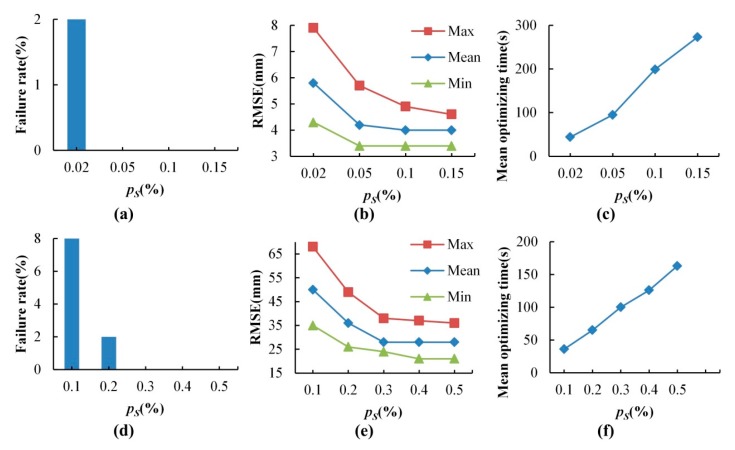
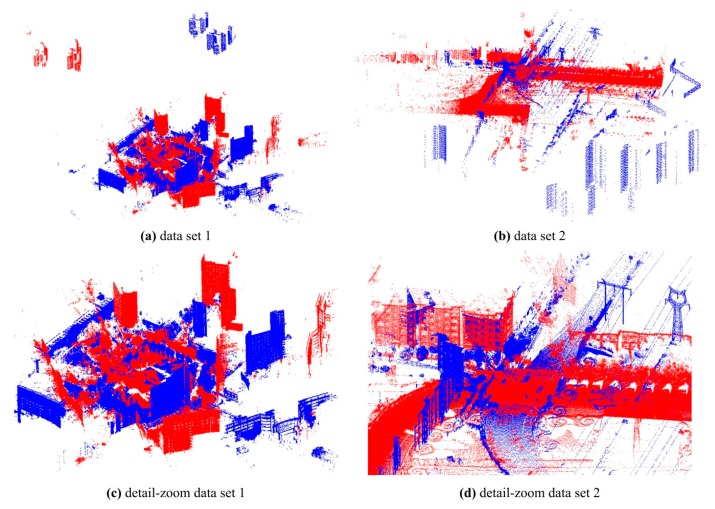
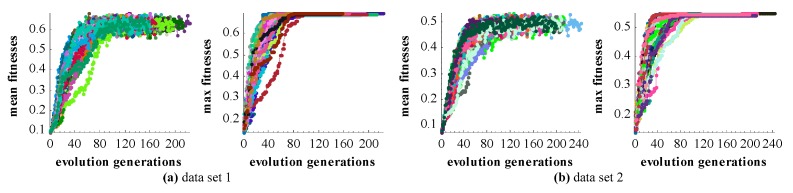
Registration of point clouds is a fundamental issue in Light Detection and Ranging (LiDAR) remote sensing because point clouds scanned from multiple scan stations or by different platforms need to be transformed to a uniform coordinate reference frame. This paper proposes an efficient registration method based on genetic algorithm (GA) for automatic alignment of two terrestrial LiDAR scanning (TLS) point clouds (TLS-TLS point clouds) and alignment between TLS and mobile LiDAR scanning (MLS) point clouds (TLS-MLS point clouds). The scanning station position acquired by the TLS built-in GPS and the quasi-horizontal orientation of the LiDAR sensor in data acquisition are used as constraints to narrow the search space in GA. A new fitness function to evaluate the solutions for GA, named as Normalized Sum of Matching Scores, is proposed for accurate registration. Our method is divided into five steps: selection of matching points, initialization of population, transformation of matching points, calculation of fitness values, and genetic operation. The method is verified using a TLS-TLS data set and a TLS-MLS data set. The experimental results indicate that the RMSE of registration of TLS-TLS point clouds is 35 mm, and that of TLS-MLS point clouds is 24 cm. The registration integrating the existing well-known ICP with GA is further proposed to accelerate the optimization and its optimizing time decreases by about 50%.
点云配准是激光雷达(LiDAR)遥感中的一个基本问题,因为从多个扫描站或不同平台扫描得到的点云需要转换到统一的坐标参考系中。本文提出了一种基于遗传算法(GA)的高效配准方法,用于自动对齐两个地面激光雷达扫描(TLS)点云(TLS-TLS点云)以及TLS与移动激光雷达扫描(MLS)点云之间的对齐(TLS-MLS点云)。利用TLS内置GPS获取的扫描站位置以及数据采集中激光雷达传感器的准水平方向作为约束条件,以缩小遗传算法中的搜索空间。提出了一种新的适应度函数来评估遗传算法的解,称为归一化匹配分数之和,用于精确配准。我们的方法分为五个步骤:匹配点的选择、种群初始化、匹配点的变换、适应度值的计算以及遗传操作。使用一个TLS-TLS数据集和一个TLS-MLS数据集对该方法进行了验证。实验结果表明,TLS-TLS点云配准的均方根误差(RMSE)为35毫米,TLS-MLS点云配准的RMSE为24厘米。进一步提出了将现有的著名迭代最近点(ICP)算法与遗传算法相结合的配准方法,以加速优化过程,其优化时间减少了约50%。