Yoon Hyungchul, Hoskere Vedhus, Park Jong-Woong, Spencer Billie F
Department of Civil and Environmental Engineering, Michigan Technological University, Houghton, MI 49930, USA.
Department of Civil and Environmental Engineering, University of Illinois at Urbana-Champaign, Urbana, IL 61801, USA.
Sensors (Basel). 2017 Sep 11;17(9):2075. doi: 10.3390/s17092075.
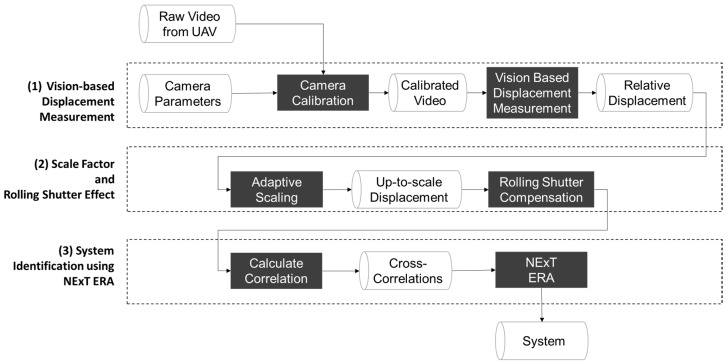
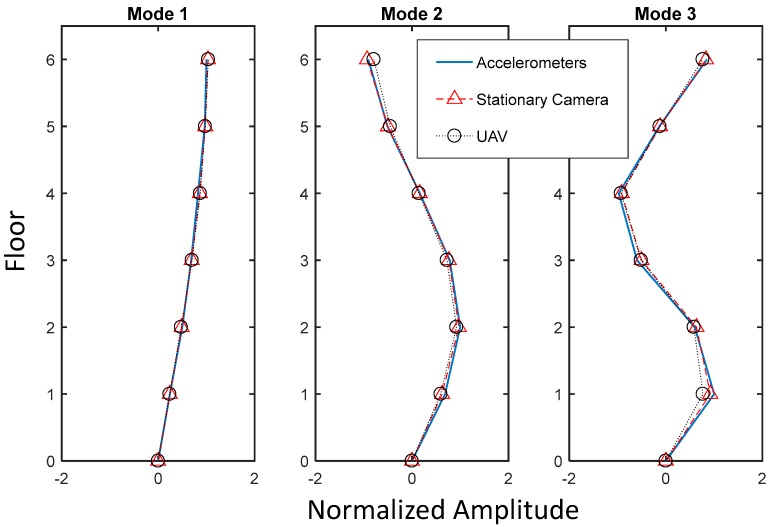
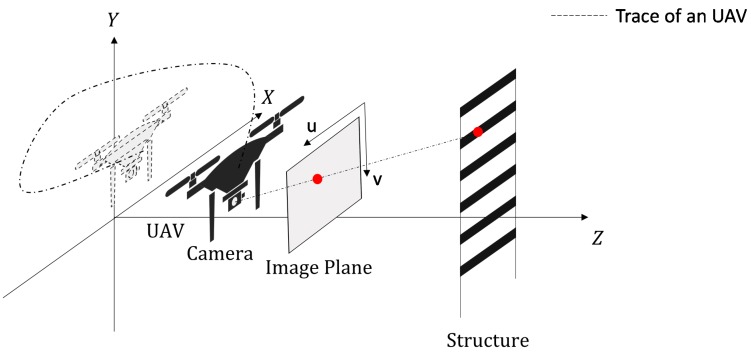
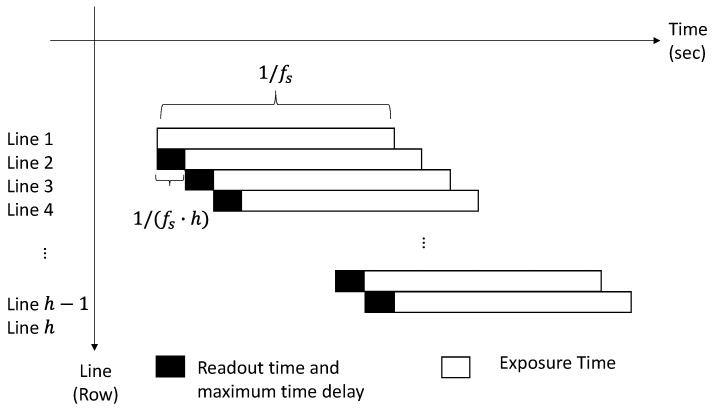
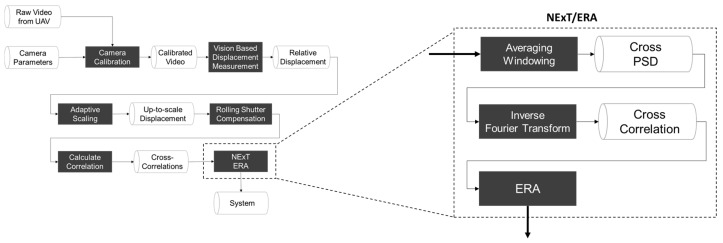
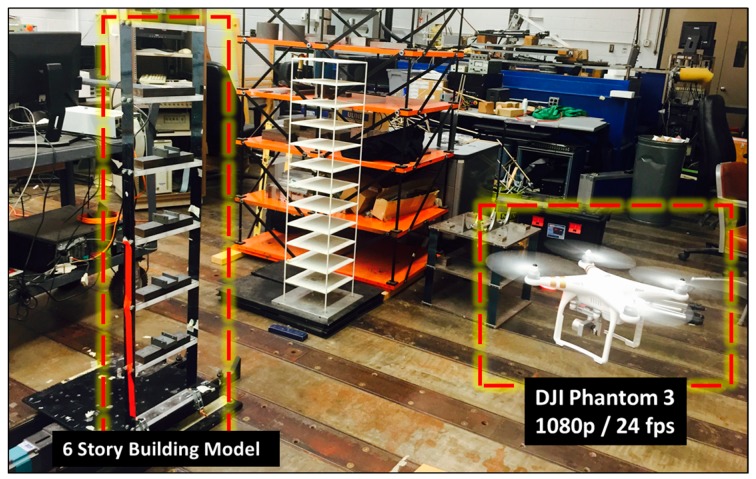
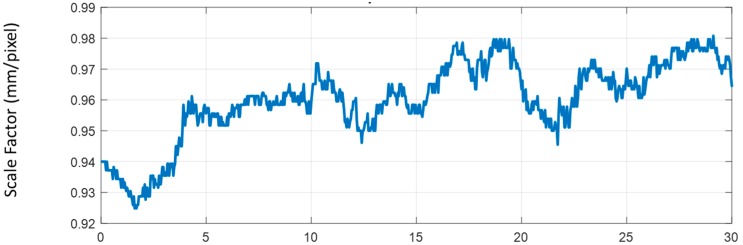
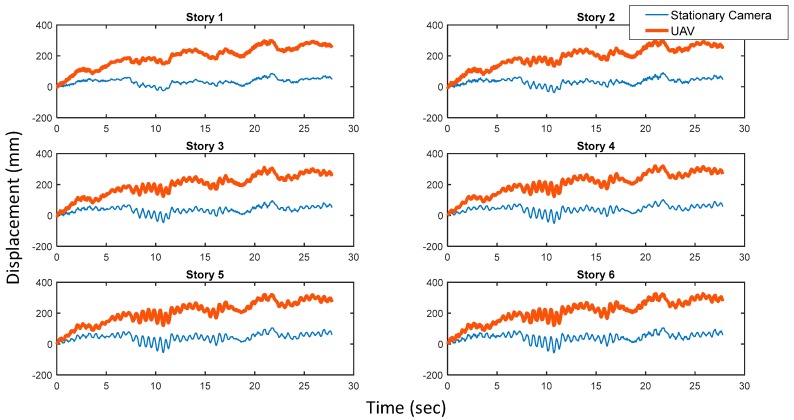
Computer vision techniques have been employed to characterize dynamic properties of structures, as well as to capture structural motion for system identification purposes. All of these methods leverage image-processing techniques using a stationary camera. This requirement makes finding an effective location for camera installation difficult, because civil infrastructure (i.e., bridges, buildings, etc.) are often difficult to access, being constructed over rivers, roads, or other obstacles. This paper seeks to use video from Unmanned Aerial Vehicles (UAVs) to address this problem. As opposed to the traditional way of using stationary cameras, the use of UAVs brings the issue of the camera itself moving; thus, the displacements of the structure obtained by processing UAV video are relative to the UAV camera. Some efforts have been reported to compensate for the camera motion, but they require certain assumptions that may be difficult to satisfy. This paper proposes a new method for structural system identification using the UAV video directly. Several challenges are addressed, including: (1) estimation of an appropriate scale factor; and (2) compensation for the rolling shutter effect. Experimental validation is carried out to validate the proposed approach. The experimental results demonstrate the efficacy and significant potential of the proposed approach.
计算机视觉技术已被用于表征结构的动态特性,以及为系统识别目的捕捉结构运动。所有这些方法都利用使用固定相机的图像处理技术。这一要求使得为相机安装找到一个有效位置变得困难,因为土木基础设施(如桥梁、建筑物等)通常难以进入,它们建在河流、道路或其他障碍物之上。本文旨在使用无人机(UAV)的视频来解决这个问题。与使用固定相机的传统方式不同,无人机的使用带来了相机本身移动的问题;因此,通过处理无人机视频获得的结构位移是相对于无人机相机的。已经有一些报道致力于补偿相机运动,但它们需要某些可能难以满足的假设。本文提出了一种直接使用无人机视频进行结构系统识别的新方法。解决了几个挑战,包括:(1)估计合适的比例因子;以及(2)补偿滚动快门效应。进行了实验验证以验证所提出的方法。实验结果证明了所提出方法的有效性和巨大潜力。