Cacucciolo Vito, Shigemune Hiroki, Cianchetti Matteo, Laschi Cecilia, Maeda Shingo
The Bio Robotics Institute Scuola Superiore Sant' Anna Viale Rinaldo Piaggio 34 Pontedera (Pisa) 56025 Italy.
Department of Applied Physics Graduate School of Science and Engineering Waseda University 3-4-1 Okubo Shinjuku-ku Tokyo 169-8555 Japan.
Adv Sci (Weinh). 2017 May 22;4(9):1600495. doi: 10.1002/advs.201600495. eCollection 2017 Sep.
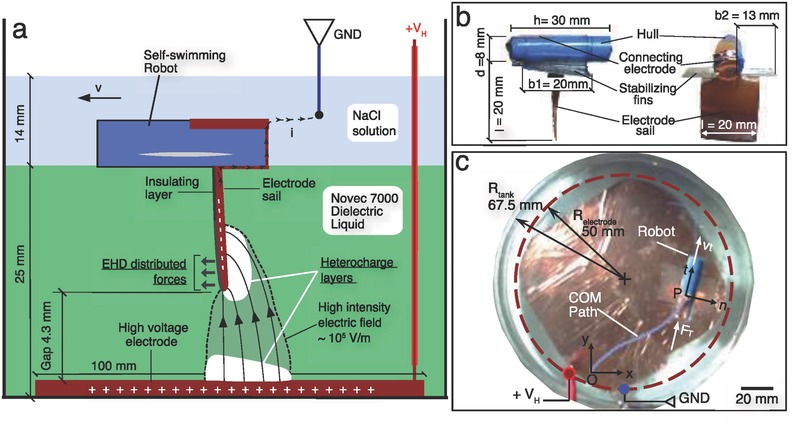
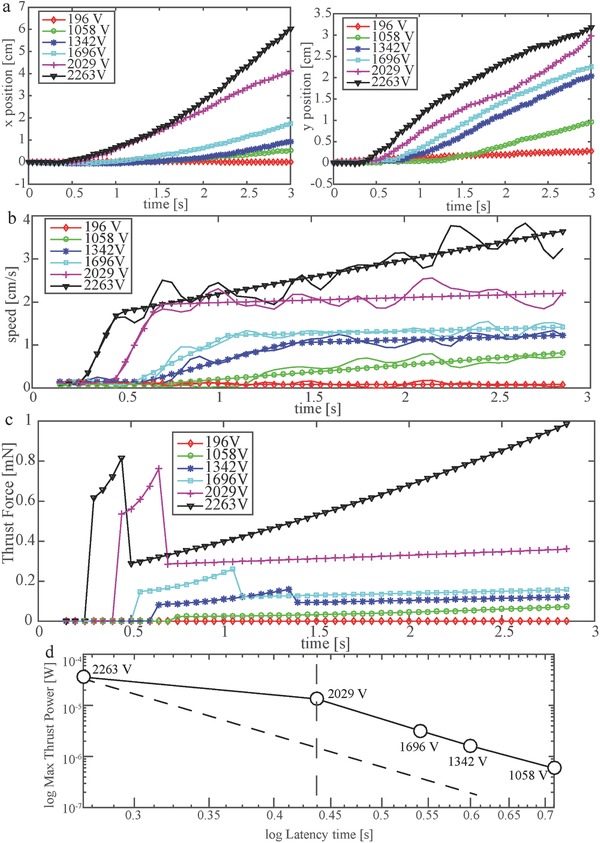
Electrohydrodynamics (EHD) refers to the direct conversion of electrical energy into mechanical energy of a fluid. Through the use of mobile electrodes, this principle is exploited in a novel fashion for designing and testing a millimeter-scale untethered robot, which is powered harvesting the energy from an external electric field. The robot is designed as an inverted sail-boat, with the thrust generated on the sail submerged in the liquid. The diffusion constant of the robot is experimentally computed, proving that its movement is not driven by thermal fluctuations, and then its kinematic and dynamic responses are characterized for different applied voltages. The results show the feasibility of using EHD with mobile electrodes for powering untethered robots and provide new evidences for the further development of this actuation system for both mobile robots and compliant actuators in soft robotics.
电流体动力学(EHD)是指将电能直接转换为流体的机械能。通过使用可移动电极,这一原理以一种新颖的方式被用于设计和测试一种毫米级的无系绳机器人,该机器人通过从外部电场收集能量来供电。该机器人被设计成倒置的帆船形状,帆上产生的推力作用于浸没在液体中的部分。通过实验计算了机器人的扩散常数,证明其运动不是由热涨落驱动的,然后对不同施加电压下机器人的运动学和动力学响应进行了表征。结果表明了使用带有可移动电极的电流体动力学为无系绳机器人供电的可行性,并为这种驱动系统在移动机器人和软机器人中的柔顺致动器方面的进一步发展提供了新的证据。