IEEE Trans Neural Syst Rehabil Eng. 2018 Jan;26(1):224-232. doi: 10.1109/TNSRE.2017.2756023. Epub 2017 Sep 22.
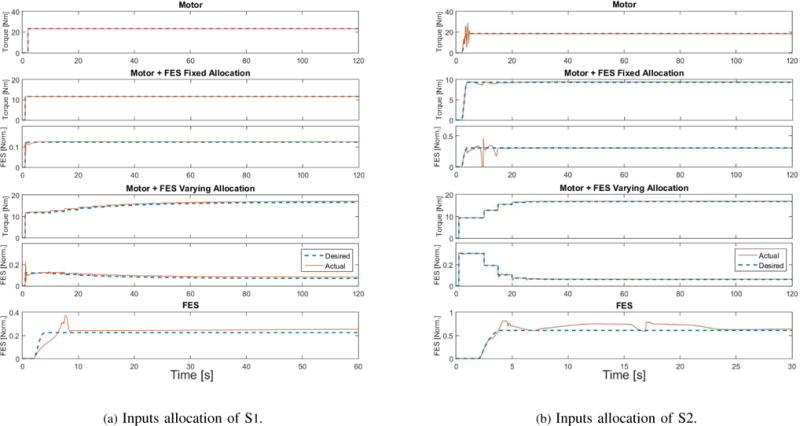
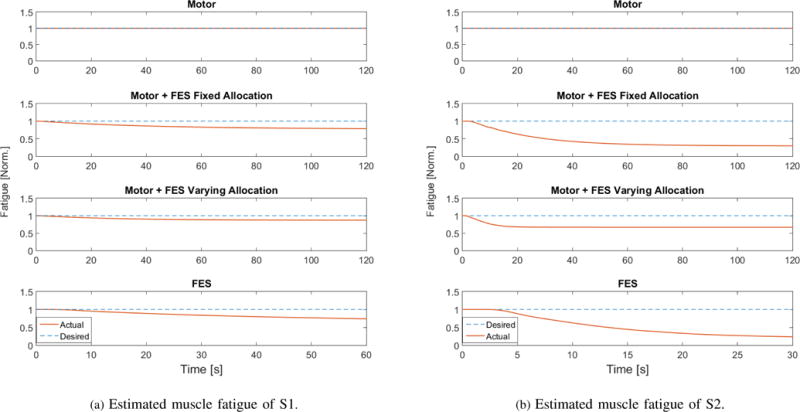
A hybrid neuroprosthesis that combines human muscle power, elicited through functional electrical stimulation (FES), with a powered orthosis may be advantageous over a sole FES or a powered exoskeleton-based rehabilitation system. The hybrid system can conceivably overcome torque reduction due to FES-induced muscle fatigue by complementarily using torque from the powered exoskeleton. The second advantage of the hybrid system is that the use of human muscle power can supplement the powered exoskeleton's power (motor torque) requirements; thus, potentially reducing the size and weight of a walking restoration system. To realize these advantages, however, it is unknown how to concurrently optimize desired control performance and allocation of control inputs between FES and electric motor. In this paper, a model predictive control-based dynamic control allocation (DCA) is used to allocate control between FES and the electric motor that simultaneously maintain a desired knee angle. The experimental results, depicting the performance of the DCA method while the muscle fatigues, are presented for an able-bodied participant and a participant with spinal cord injury. The experimental results showed that the motor torque recruited by the hybrid system was less than that recruited by the motor-only system, the algorithm can be easily used to allocate more control input to the electric motor as the muscle fatigues, and the muscle fatigue induced by the hybrid system was found to be less than the fatigue induced by sole FES. These results validate the aforementioned advantages of the hybrid system; thus implying the hybrid technology's potential use in walking rehabilitation.
一种混合神经假体,将人体肌肉力量(通过功能性电刺激 (FES) 产生)与动力矫形器相结合,可能优于单纯的 FES 或基于动力外骨骼的康复系统。混合系统可以通过互补地使用动力外骨骼的扭矩,想象地克服由于 FES 引起的肌肉疲劳导致的扭矩降低。混合系统的第二个优势是,人体肌肉力量的使用可以补充动力外骨骼的功率(电机扭矩)要求;因此,可能会降低行走恢复系统的尺寸和重量。然而,为了实现这些优势,尚不清楚如何同时优化所需的控制性能以及在 FES 和电动机之间分配控制输入。在本文中,基于模型预测控制的动态控制分配 (DCA) 用于在 FES 和电动机之间分配控制,同时保持期望的膝关节角度。实验结果描绘了肌肉疲劳时 DCA 方法的性能,实验结果分别为健康参与者和脊髓损伤参与者展示。实验结果表明,混合系统募集的电机扭矩小于仅电机系统募集的电机扭矩,随着肌肉疲劳,该算法可以轻松地将更多控制输入分配给电动机,并且发现混合系统引起的肌肉疲劳小于单独 FES 引起的疲劳。这些结果验证了混合系统的上述优势;因此,暗示混合技术在行走康复中的潜在用途。