Faculty of Information Technology, Beijing University of Technology, Beijing 100124, China.
Beijing Key Lab of the Computational Intelligence and Intelligent System, Beijing 100124, China.
Sensors (Basel). 2017 Nov 10;17(11):2592. doi: 10.3390/s17112592.
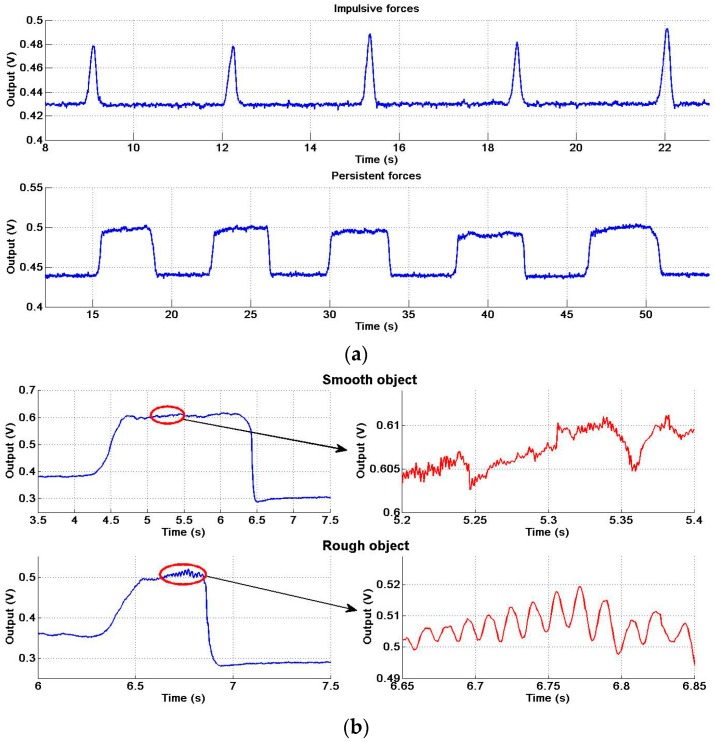
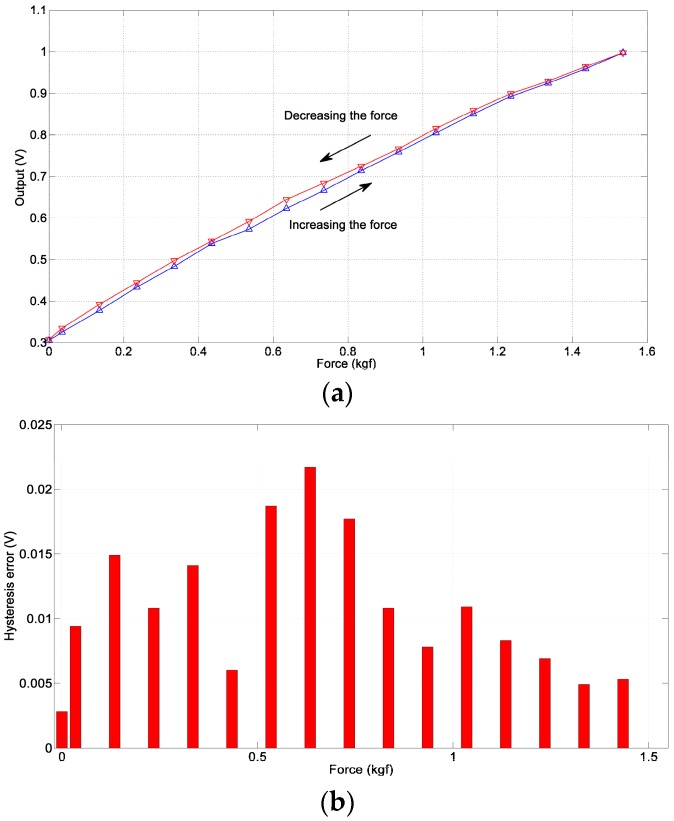
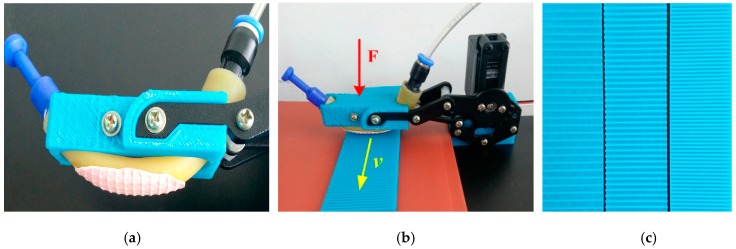
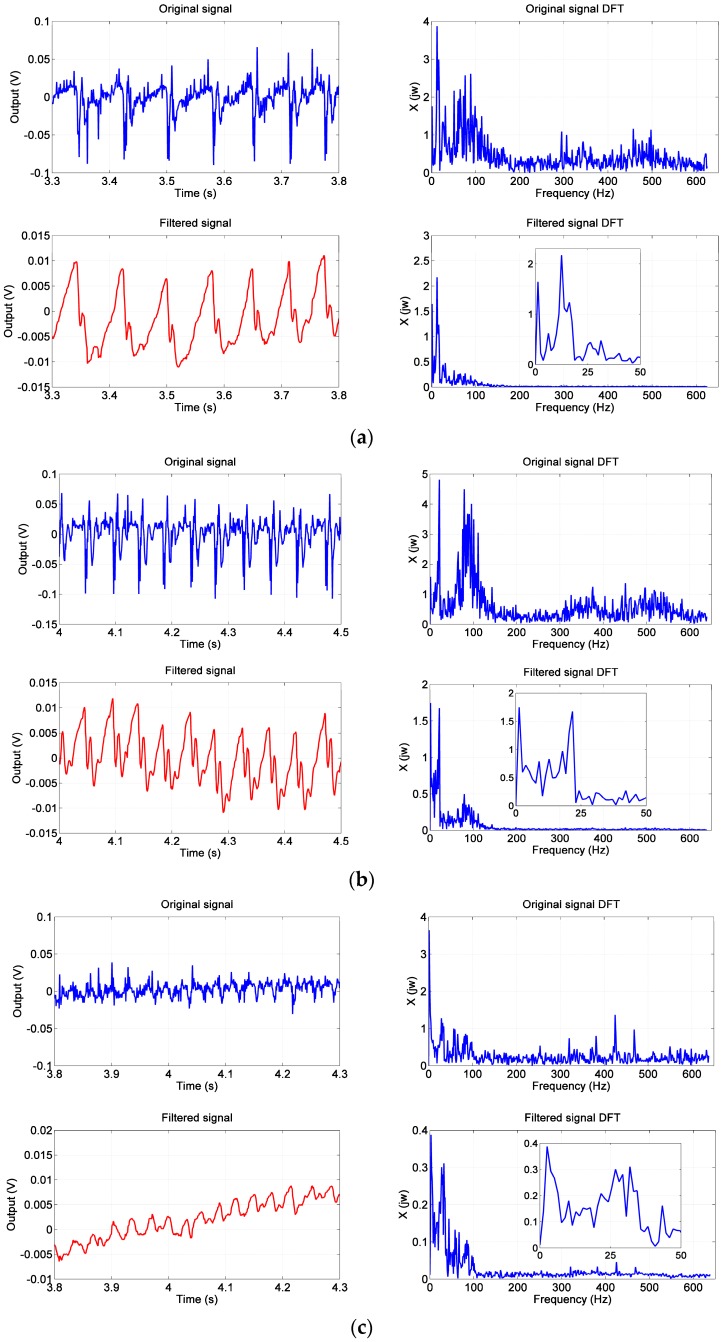
Tactile sensors of comprehensive functions are urgently needed for the advanced robot to co-exist and co-operate with human beings. Pneumatic tactile sensors based on air bladder possess some noticeable advantages for human-robot interaction application. In this paper, we construct a pneumatic tactile sensor and apply it on the fingertip of robot hand to realize the sensing of force, vibration and slippage via the change of the pressure of the air bladder, and we utilize the sensor to perceive the object's features such as softness and roughness. The pneumatic tactile sensor has good linearity, repeatability and low hysteresis and both its size and sensing range can be customized by using different material as well as different thicknesses of the air bladder. It is also simple and cheap to fabricate. Therefore, the pneumatic tactile sensor is suitable for the application of co-operative robots and can be widely utilized to improve the performance of service robots. We can apply it to the fingertip of the robot to endow the robotic hand with the ability to co-operate with humans and handle the fragile objects because of the inherent compliance of the air bladder.
为了使先进机器人能够与人类共存和协作,迫切需要具有综合功能的触觉传感器。基于气袋的气动触觉传感器在人机交互应用中具有一些显著的优势。本文构建了一种气动触觉传感器,并将其应用于机器人手的指尖,通过气袋压力的变化来实现力、振动和滑移的感测,并利用传感器感知物体的柔软度和粗糙度等特征。气动触觉传感器具有良好的线性度、重复性和低滞后性,其尺寸和感测范围可以通过使用不同的材料以及不同厚度的气袋来定制。它的制作也简单且便宜。因此,气动触觉传感器适用于协作机器人的应用,可以广泛用于提高服务机器人的性能。我们可以将其应用于机器人的指尖,赋予机器人手与人类协作和处理易碎物体的能力,这是因为气袋具有固有顺应性。