Merad Manelle, de Montalivet Étienne, Touillet Amélie, Martinet Noël, Roby-Brami Agnès, Jarrassé Nathanaël
Agathe Group, Institut des Systèmes Intelligents et de Robotique, UPMC Univ Paris 06, Sorbonne Universités, Paris, France.
Centre National de la Recherche Scientifique, UMR 7222, Paris, France.
Front Neurorobot. 2018 Feb 2;12:1. doi: 10.3389/fnbot.2018.00001. eCollection 2018.
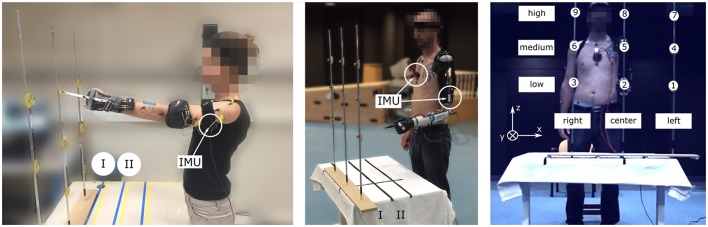
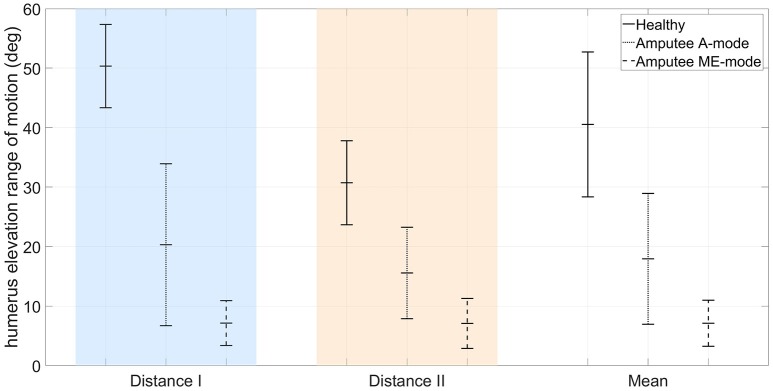
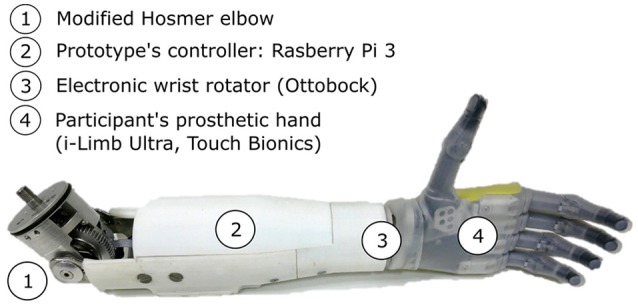
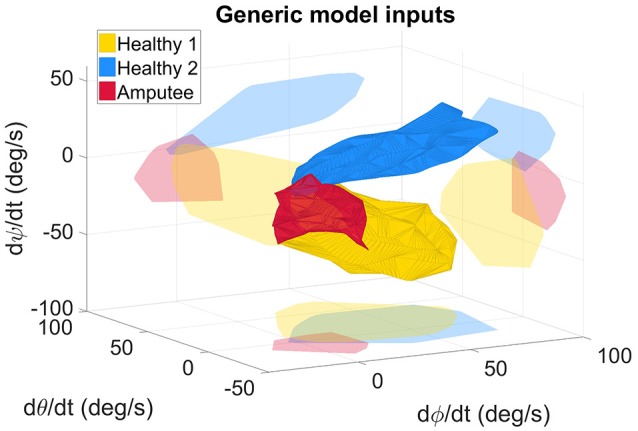
Most transhumeral amputees report that their prosthetic device lacks functionality, citing the control strategy as a major limitation. Indeed, they are required to control several degrees of freedom with muscle groups primarily used for elbow actuation. As a result, most of them choose to have a one-degree-of-freedom myoelectric hand for grasping objects, a myoelectric wrist for pronation/supination, and a body-powered elbow. Unlike healthy upper limb movements, the prosthetic elbow joint angle, adjusted prior to the motion, is not involved in the overall upper limb movements, causing the rest of the body to compensate for the lack of mobility of the prosthesis. A promising solution to improve upper limb prosthesis control exploits the residual limb mobility: like in healthy movements, shoulder and prosthetic elbow motions are coupled using inter-joint coordination models. The present study aims to test this approach. A transhumeral amputated individual used a prosthesis with a residual limb motion-driven elbow to point at targets. The prosthetic elbow motion was derived from IMU-based shoulder measurements and a generic model of inter-joint coordinations built from healthy individuals data. For comparison, the participant also performed the task while the prosthetic elbow was implemented with his own myoelectric control strategy. The results show that although the transhumeral amputated participant achieved the pointing task with a better precision when the elbow was myoelectrically-controlled, he had to develop large compensatory trunk movements. Automatic elbow control reduced trunk displacements, and enabled a more natural body behavior with synchronous shoulder and elbow motions. However, due to socket impairments, the residual limb amplitudes were not as large as those of healthy shoulder movements. Therefore, this work also investigates if a control strategy whereby prosthetic joints are automatized according to healthy individuals' coordination models can lead to an intuitive and natural prosthetic control.
大多数经肱骨截肢者表示,他们的假肢装置缺乏功能性,并指出控制策略是一个主要限制因素。事实上,他们需要用主要用于肘部驱动的肌肉群来控制多个自由度。因此,他们中的大多数人选择使用单自由度肌电手来抓握物体,使用肌电手腕来进行旋前/旋后动作,并使用体动力肘部。与健康的上肢运动不同,在运动前调整好的假肢肘关节角度并不参与整个上肢运动,导致身体的其他部分要补偿假肢缺乏的活动性。一种有望改善上肢假肢控制的解决方案是利用残肢的活动性:就像在健康运动中一样,通过关节间协调模型将肩部和假肢肘部的运动耦合起来。本研究旨在测试这种方法。一名经肱骨截肢的个体使用了一个由残肢运动驱动肘部的假肢来指向目标。假肢肘部的运动是从基于惯性测量单元(IMU)的肩部测量数据以及根据健康个体数据构建的关节间协调通用模型得出的。为了进行比较,参与者在使用自己的肌电控制策略来控制假肢肘部时也执行了该任务。结果表明,尽管经肱骨截肢的参与者在肘部采用肌电控制时能够以更高的精度完成指向任务,但他不得不做出大幅度的躯干补偿动作。自动肘部控制减少了躯干的位移,并实现了更自然的身体行为,肩部和肘部运动同步。然而,由于接受腔的缺陷,残肢的运动幅度不如健康肩部运动的幅度大。因此,这项工作还研究了一种根据健康个体的协调模型使假肢关节自动化的控制策略是否能带来直观自然的假肢控制。