Groningen Institute for Evolutionary Life Sciences, University of Groningen, Groningen, Groningen, Netherlands.
Department of Zoology, University of Oxford, Oxford, Oxfordshire, United Kingdom.
PLoS Comput Biol. 2018 Apr 12;14(4):e1006044. doi: 10.1371/journal.pcbi.1006044. eCollection 2018 Apr.
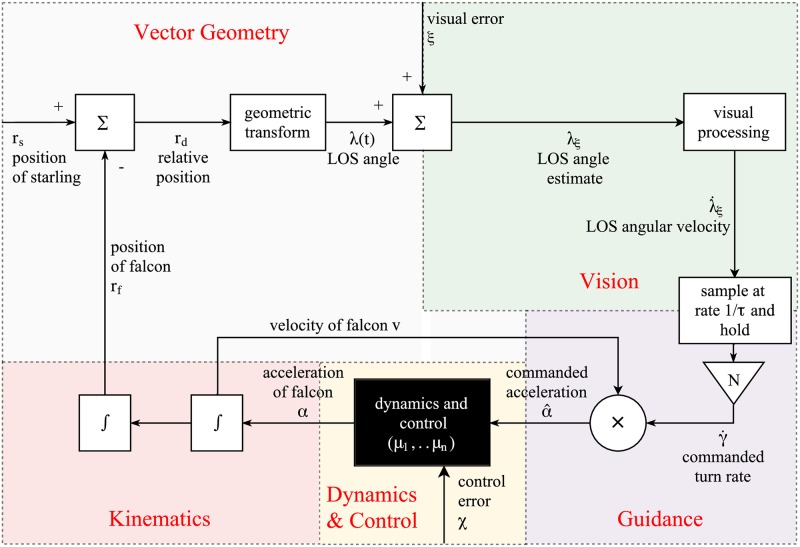
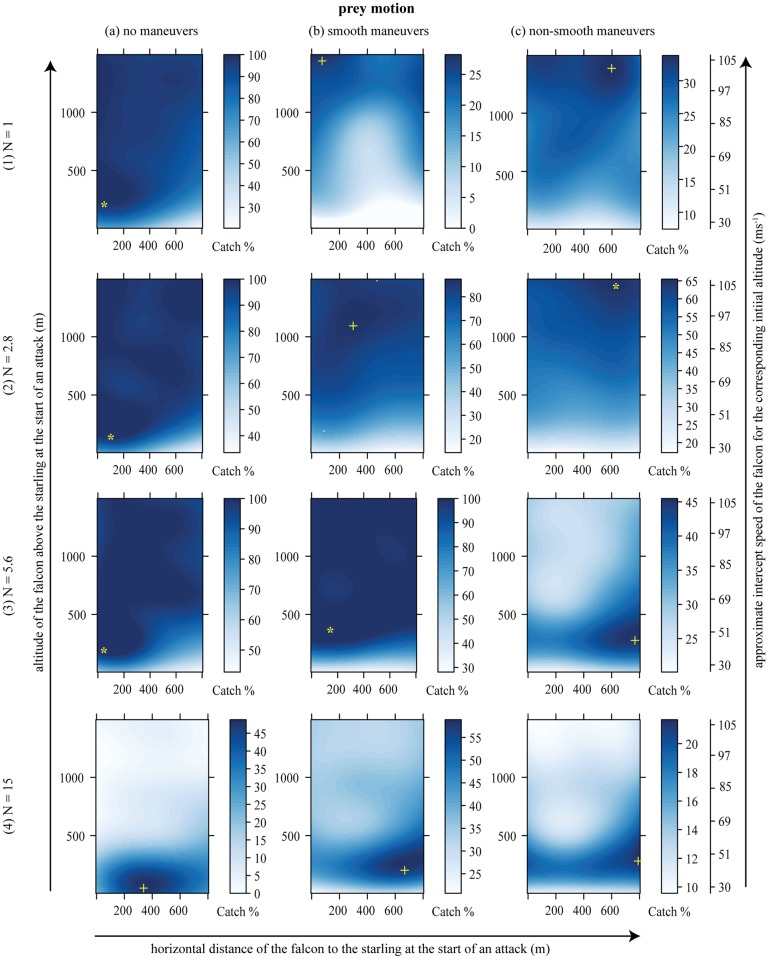
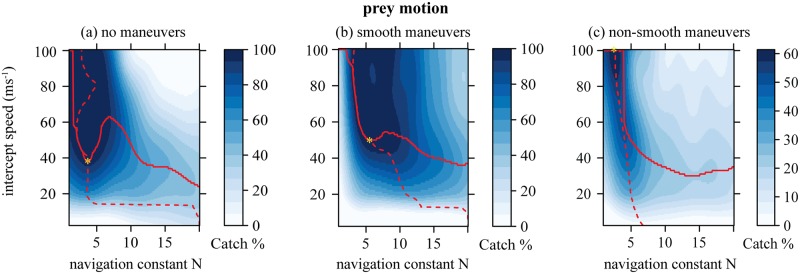
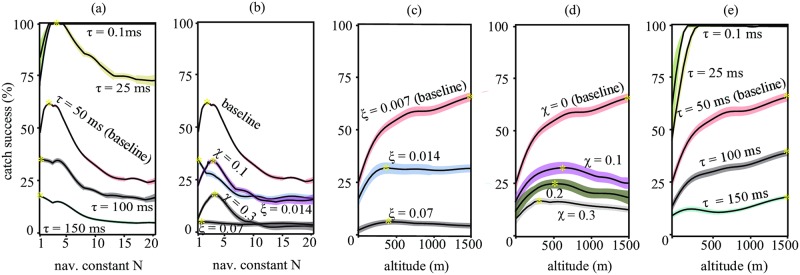
The peregrine falcon Falco peregrinus is renowned for attacking its prey from high altitude in a fast controlled dive called a stoop. Many other raptors employ a similar mode of attack, but the functional benefits of stooping remain obscure. Here we investigate whether, when, and why stooping promotes catch success, using a three-dimensional, agent-based modeling approach to simulate attacks of falcons on aerial prey. We simulate avian flapping and gliding flight using an analytical quasi-steady model of the aerodynamic forces and moments, parametrized by empirical measurements of flight morphology. The model-birds' flight control inputs are commanded by their guidance system, comprising a phenomenological model of its vision, guidance, and control. To intercept its prey, model-falcons use the same guidance law as missiles (pure proportional navigation); this assumption is corroborated by empirical data on peregrine falcons hunting lures. We parametrically vary the falcon's starting position relative to its prey, together with the feedback gain of its guidance loop, under differing assumptions regarding its errors and delay in vision and control, and for three different patterns of prey motion. We find that, when the prey maneuvers erratically, high-altitude stoops increase catch success compared to low-altitude attacks, but only if the falcon's guidance law is appropriately tuned, and only given a high degree of precision in vision and control. Remarkably, the optimal tuning of the guidance law in our simulations coincides closely with what has been observed empirically in peregrines. High-altitude stoops are shown to be beneficial because their high airspeed enables production of higher aerodynamic forces for maneuvering, and facilitates higher roll agility as the wings are tucked, each of which is essential to catching maneuvering prey at realistic response delays.
游隼 Falco peregrinus 以从高空高速控制俯冲捕食猎物而闻名,这种俯冲称为“扑食”。许多其他猛禽也采用类似的攻击方式,但扑食的功能益处仍不清楚。在这里,我们使用基于代理的三维建模方法来模拟猛禽对空中猎物的攻击,以研究扑食是否、何时以及为何能提高捕食成功率。我们使用空气动力学力和力矩的解析准稳态模型来模拟鸟类的拍打和滑翔飞行,该模型由飞行形态的经验测量进行参数化。模型鸟类的飞行控制输入由其制导系统发出,该系统由其视觉、制导和控制的现象学模型组成。为了拦截猎物,模型猎鹰使用与导弹相同的制导律(纯比例导航);这一假设得到了游隼猎取诱饵的经验数据的证实。我们根据游隼视觉、控制的误差和延迟以及猎物运动的三种不同模式,对猎鹰相对于猎物的起始位置以及其制导回路的反馈增益进行参数变化。我们发现,当猎物不规则运动时,与低空攻击相比,高空扑食会增加捕食成功率,但前提是猎鹰的制导律得到适当调整,并且在视觉和控制方面具有高度的精度。值得注意的是,我们模拟中制导律的最佳调整与游隼的经验观察非常吻合。高空扑食之所以有益,是因为其高飞行速度能够产生更高的空气动力,从而便于在翅膀收起时进行更高的滚转敏捷性,这两者对于在实际响应延迟下捕捉不规则运动的猎物都至关重要。