Maglev Engineering Research Center, National University of Defense Technology, Changsha 410073, China.
Beijing Enterprises Holdings Maglev Technology Development Co. Ltd., Beijing 100124, China.
Sensors (Basel). 2018 May 24;18(6):1697. doi: 10.3390/s18061697.
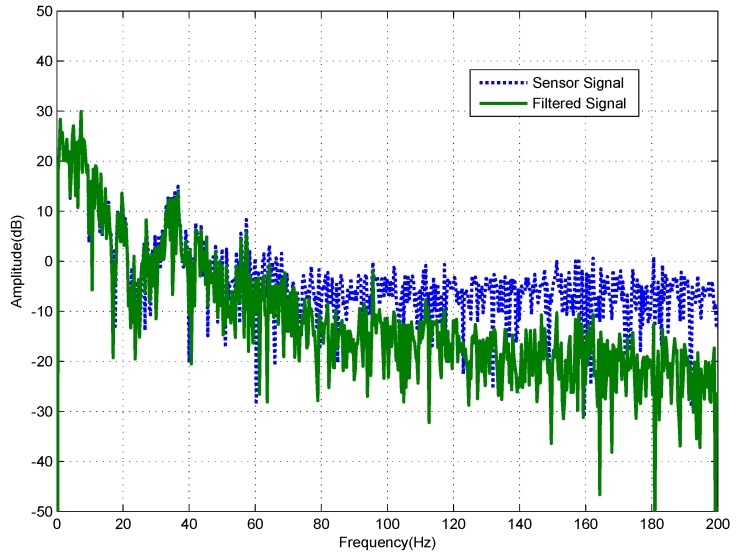
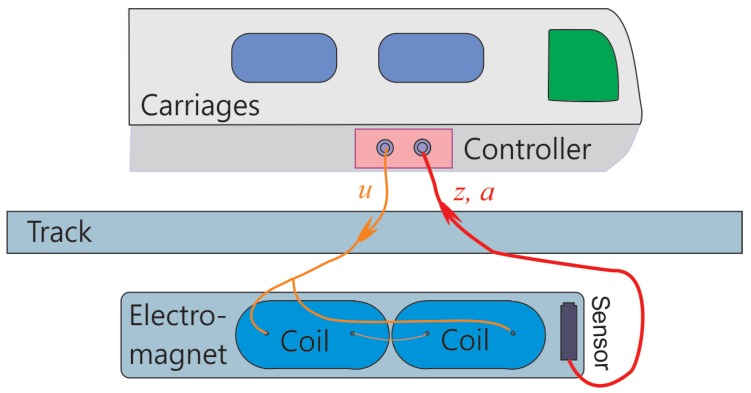
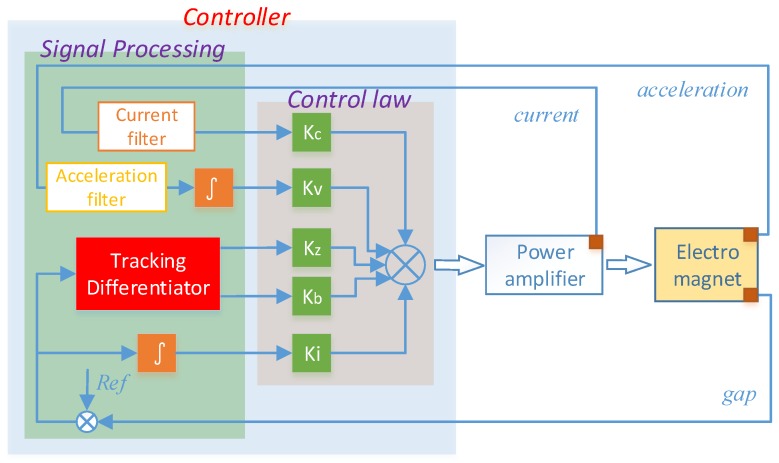
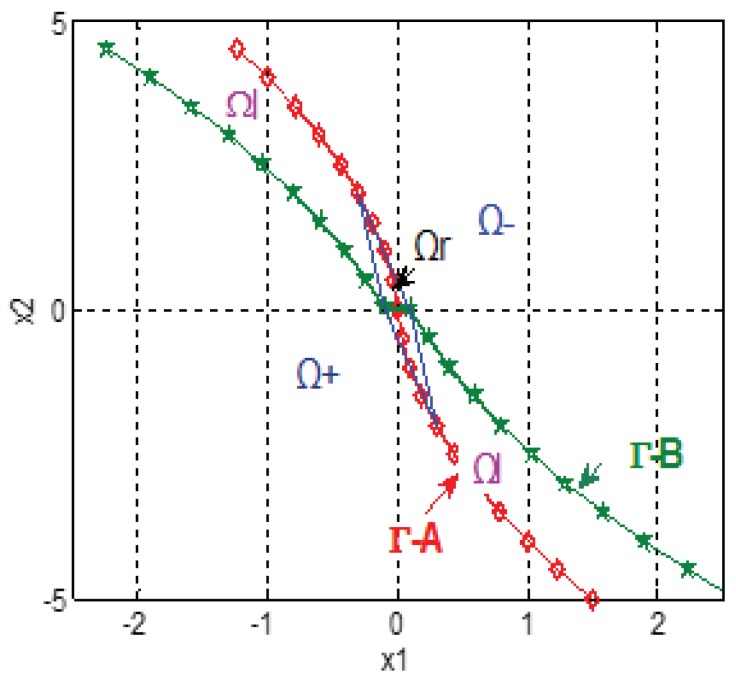
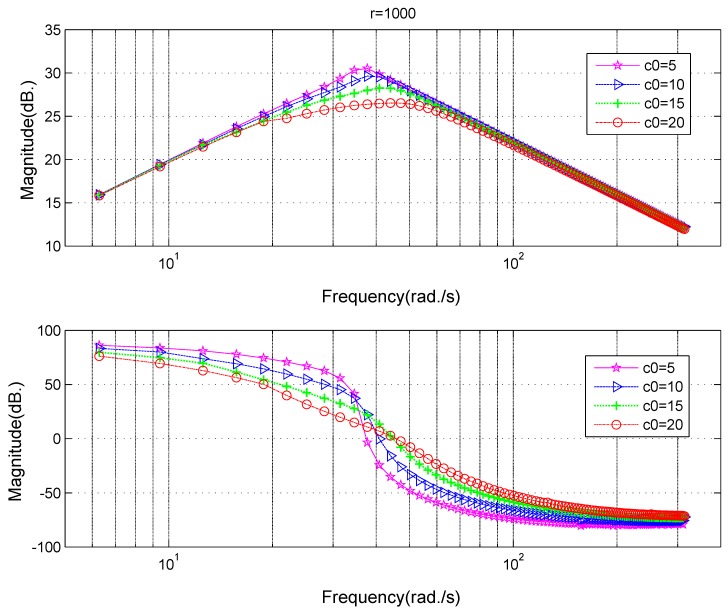
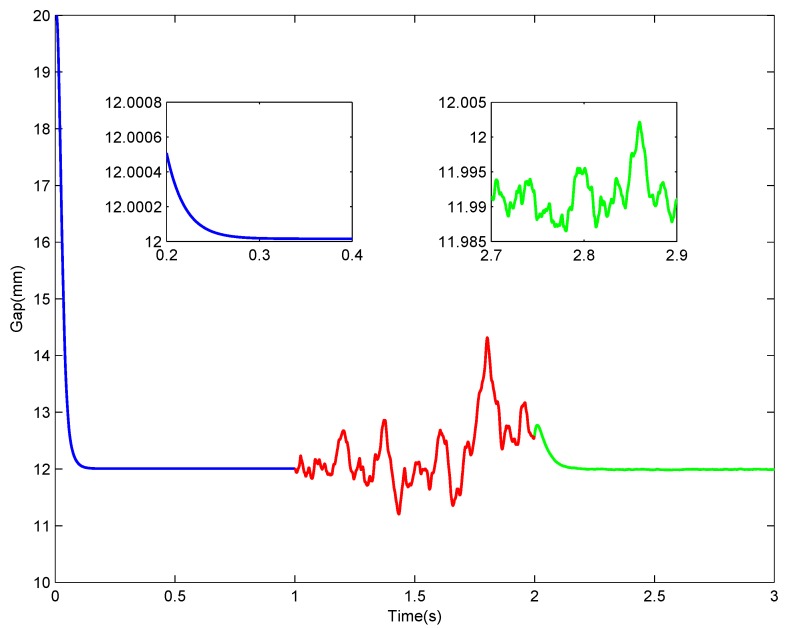
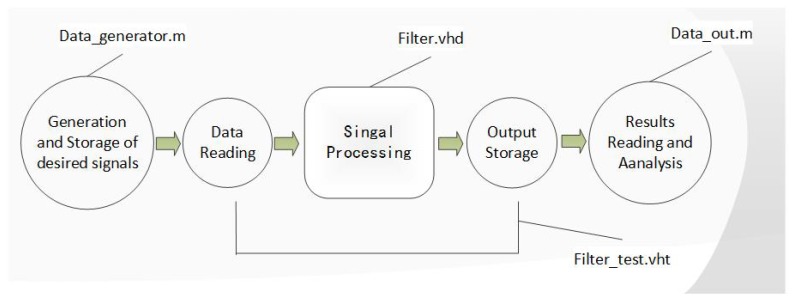
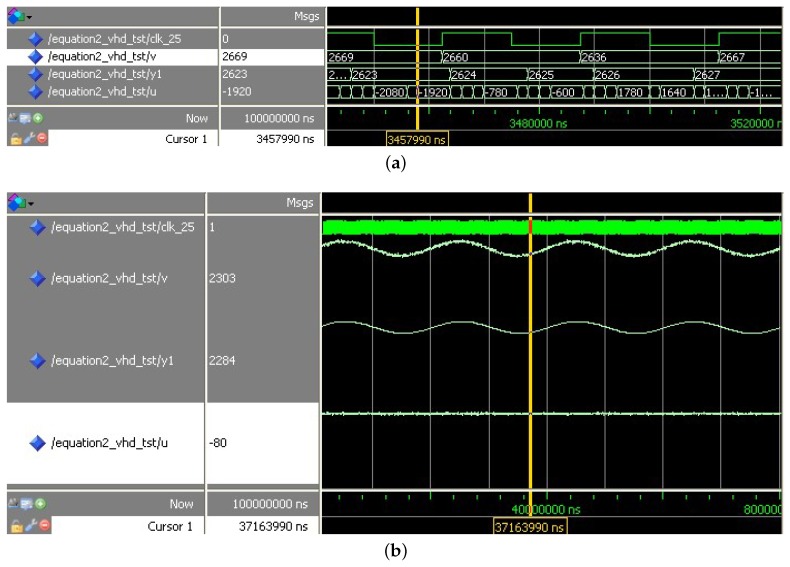
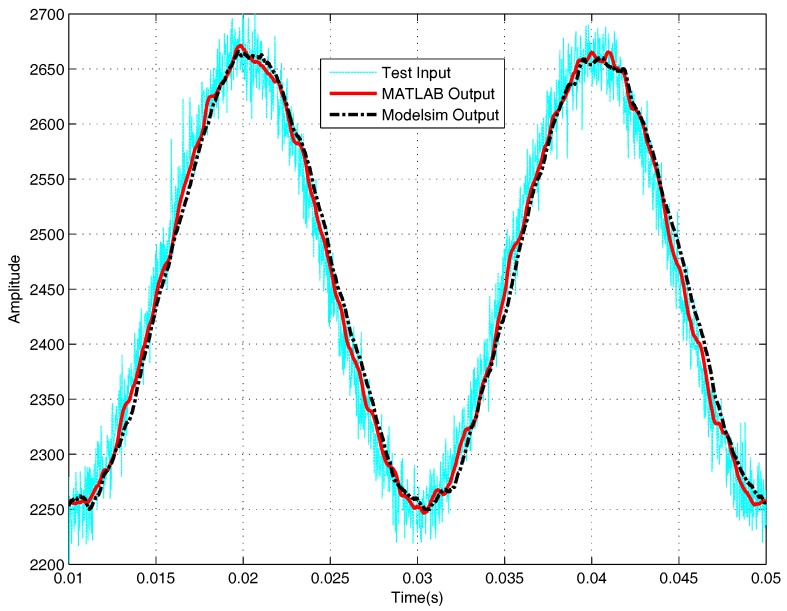
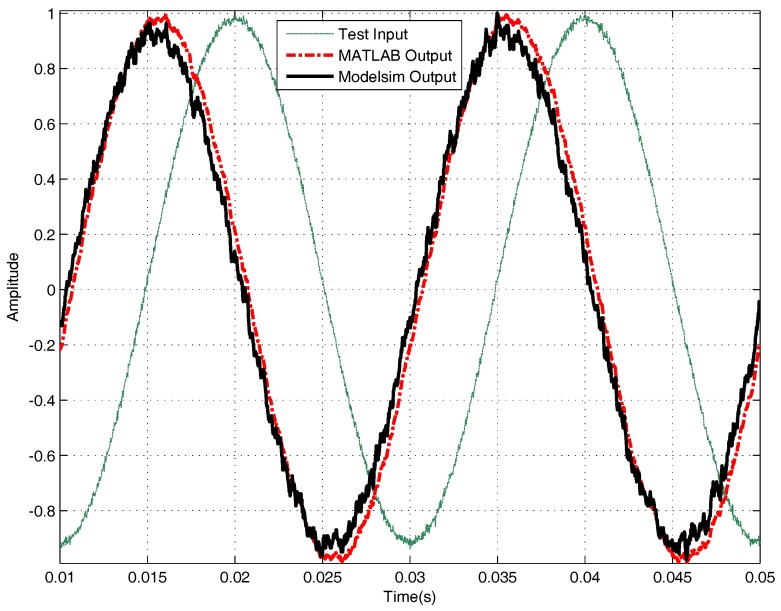
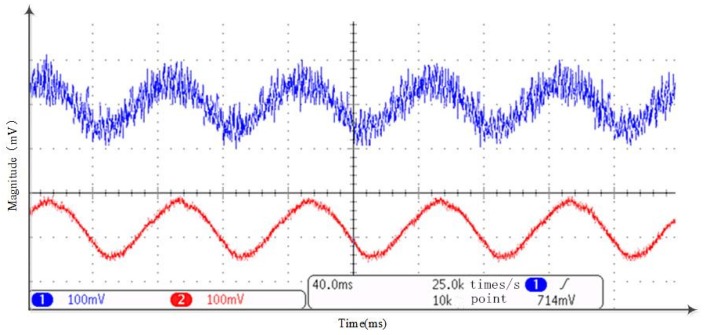
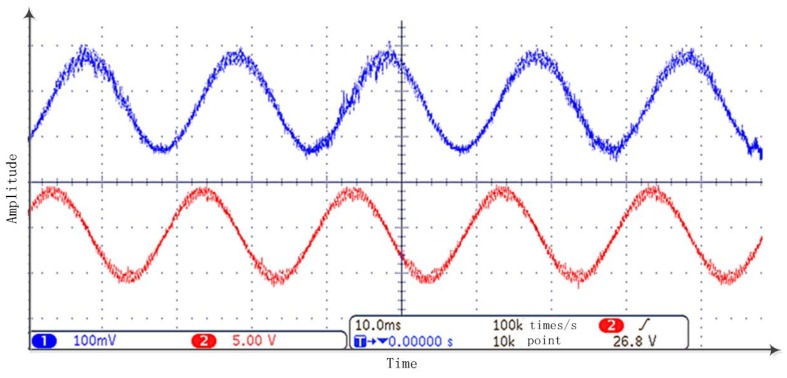
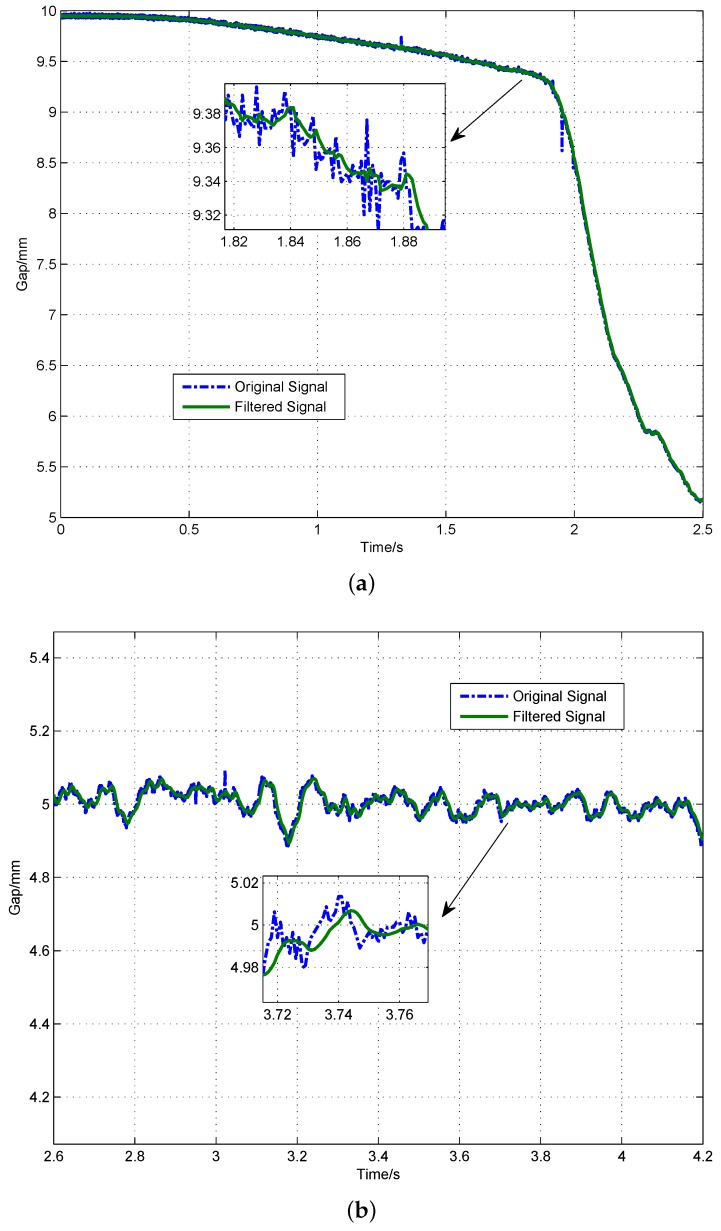
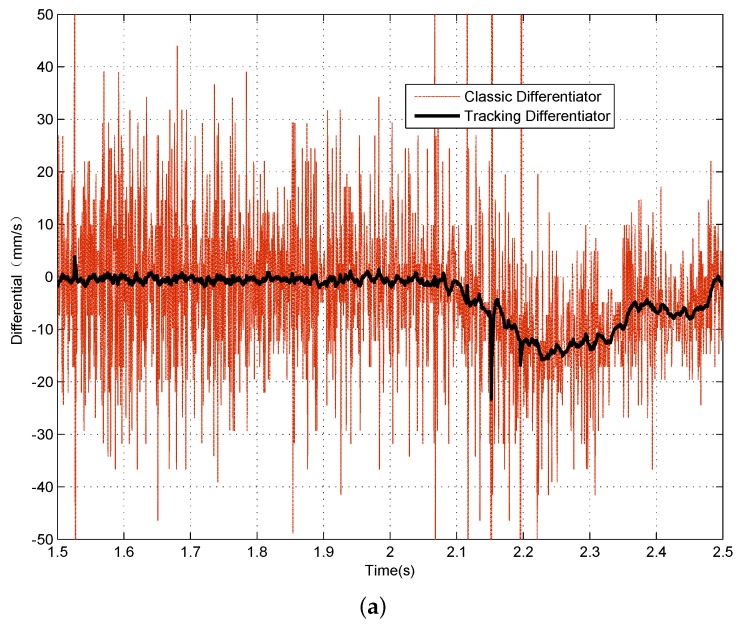
In a maglev train levitation system, signal processing plays an important role for the reason that some sensor signals are prone to be corrupted by noise due to the harsh installation and operation environment of sensors and some signals cannot be acquired directly via sensors. Based on these concerns, an architecture based on a new type of nonlinear second-order discrete tracking differentiator is proposed. The function of this signal processing architecture includes filtering signal noise and acquiring needed signals for levitation purposes. The proposed tracking differentiator possesses the advantages of quick convergence, no fluttering, and simple calculation. Tracking differentiator's frequency characteristics at different parameter values are studied in this paper. The performance of this new type of tracking differentiator is tested in a MATLAB simulation and this tracking-differentiator is implemented in Very-High-Speed Integrated Circuit Hardware Description Language (VHDL). In the end, experiments are conducted separately on a test board and a maglev train model. Simulation and experiment results show that the performance of this novel signal processing architecture can fulfill the real system requirement.
在磁悬浮列车悬浮系统中,信号处理起着重要的作用,因为一些传感器信号由于传感器的恶劣安装和运行环境容易受到噪声的干扰,并且一些信号不能直接通过传感器获得。基于这些考虑,提出了一种基于新型非线性二阶离散跟踪微分器的架构。该信号处理架构的功能包括过滤信号噪声和获取悬浮所需的信号。所提出的跟踪微分器具有快速收敛、无抖动和计算简单的优点。本文研究了不同参数值下跟踪微分器的频率特性。在 MATLAB 仿真中对这种新型跟踪微分器的性能进行了测试,并在超高速集成电路硬件描述语言 (VHDL) 中实现了该跟踪微分器。最后,分别在测试板和磁悬浮列车模型上进行了实验。仿真和实验结果表明,这种新型信号处理架构的性能可以满足实际系统的要求。