White Olivier, Karniel Amir, Papaxanthis Charalambos, Barbiero Marie, Nisky Ilana
INSERM UMR1093-CAPS, Université Bourgogne Franche-Comté, UFR des Sciences du Sport, Dijon, France.
Acquired Brain Injury Rehabilitation Alliance, School of Health Sciences, University of East Anglia, Norwich, United Kingdom.
Front Neurorobot. 2018 Jun 7;12:31. doi: 10.3389/fnbot.2018.00031. eCollection 2018.
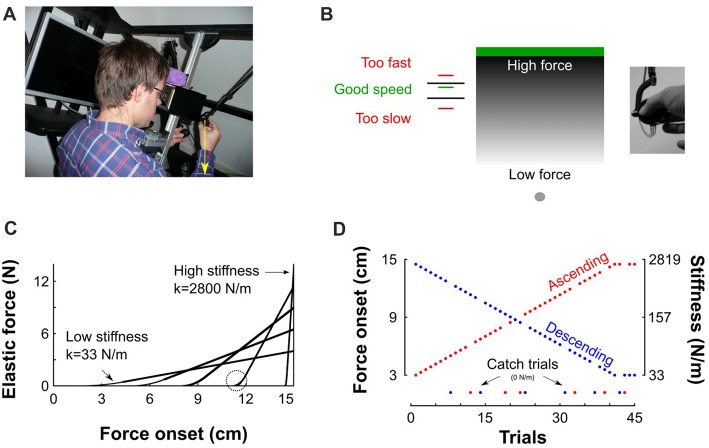
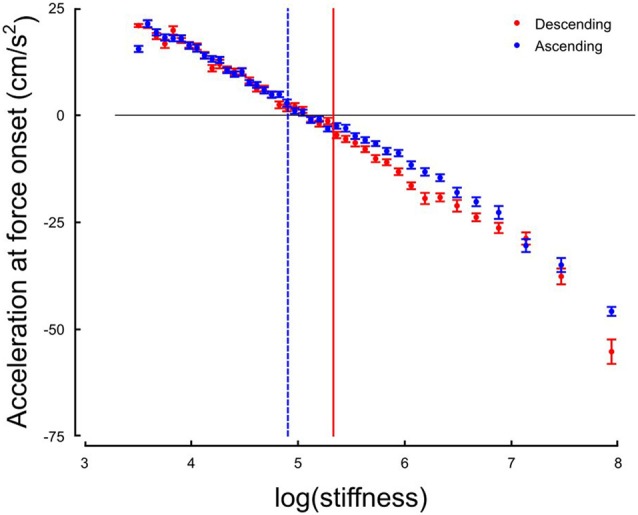
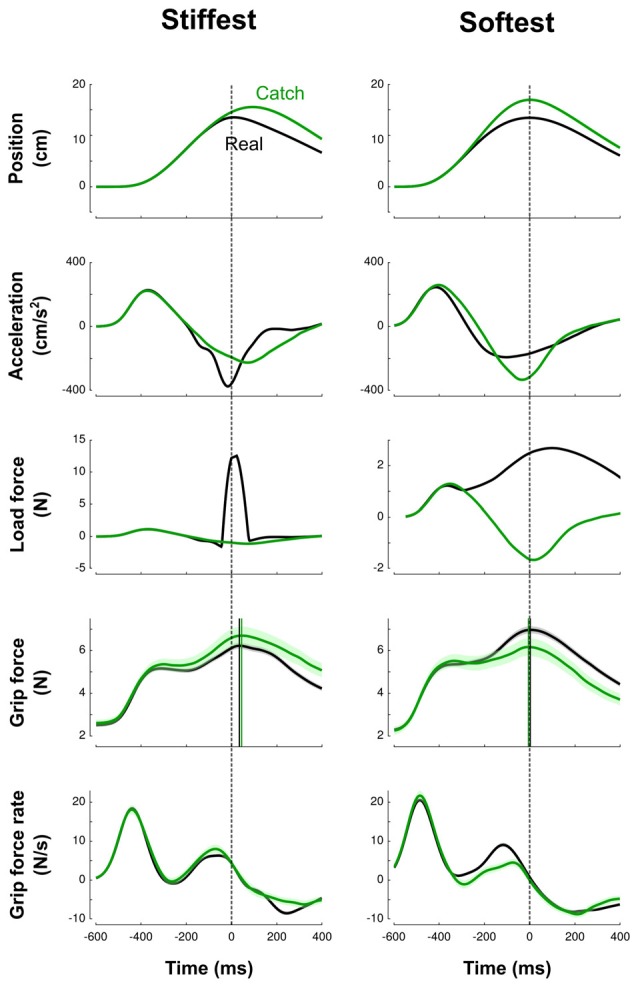
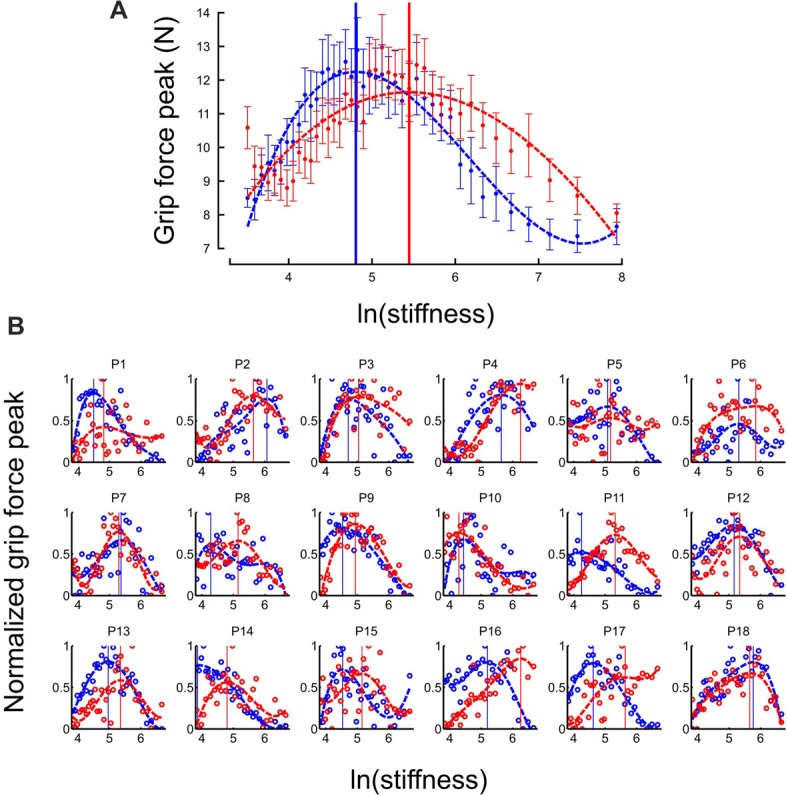
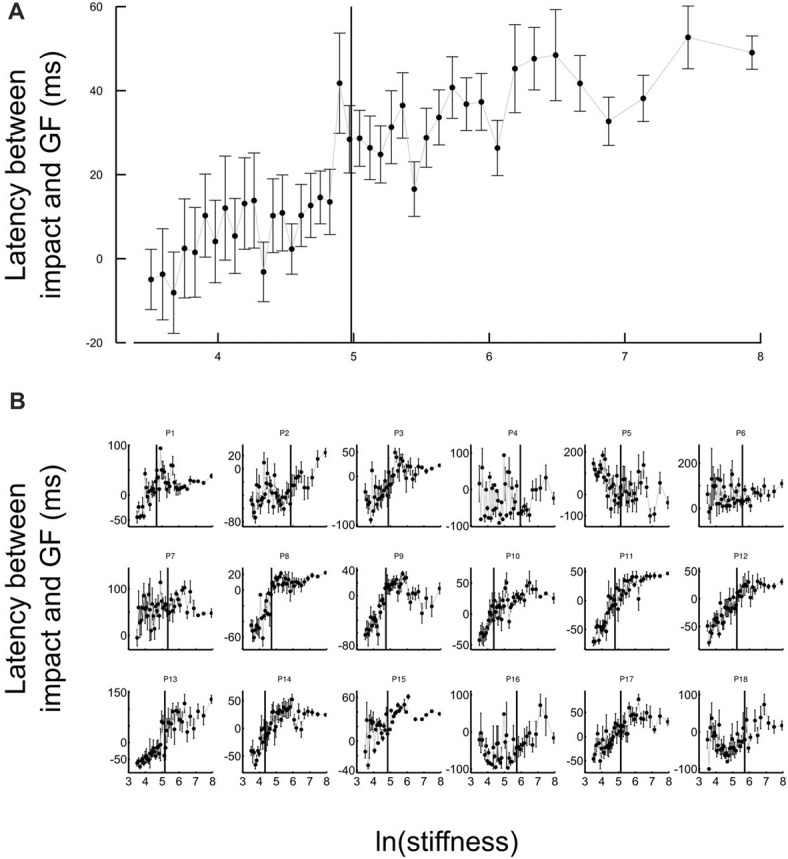
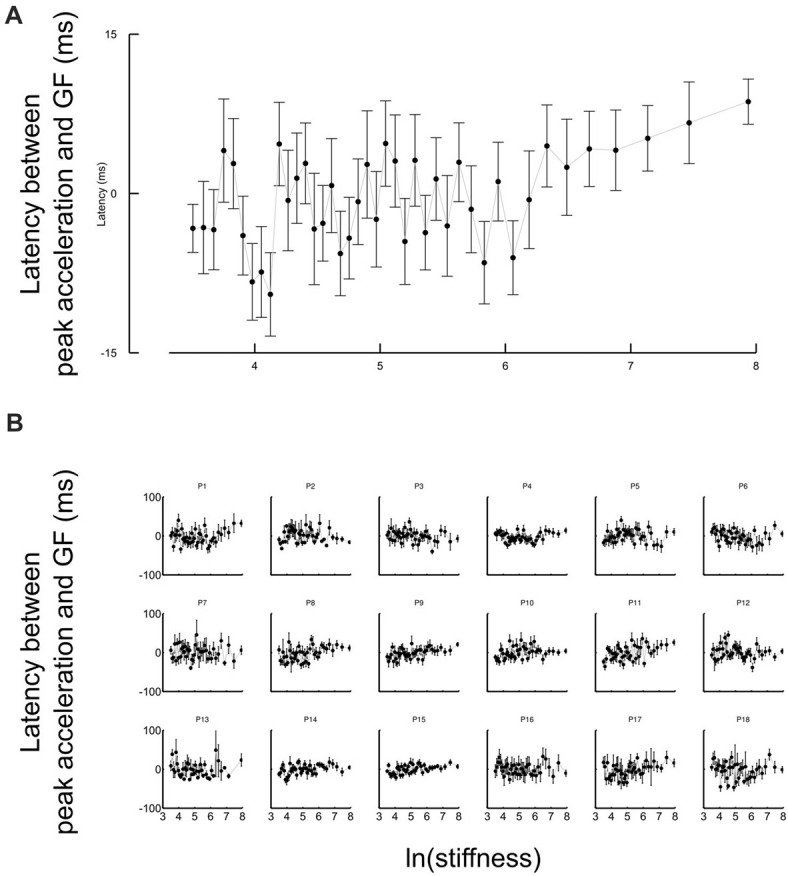
Switched systems are common in artificial control systems. Here, we suggest that the brain adopts a switched feedforward control of grip forces during manipulation of objects. We measured how participants modulated grip force when interacting with soft and rigid virtual objects when stiffness varied continuously between trials. We identified a sudden phase transition between two forms of feedforward control that differed in the timing of the synchronization between the anticipated load force and the applied grip force. The switch occurred several trials after a threshold stiffness level in the range 100-200 N/m. These results suggest that in the control of grip force, the brain acts as a switching control system. This opens new research questions as to the nature of the discrete state variables that drive the switching.
切换系统在人工控制系统中很常见。在此,我们提出大脑在物体操纵过程中采用切换式前馈控制来控制握力。我们测量了参与者在与软质和硬质虚拟物体交互时,当试验间刚度连续变化时,他们如何调节握力。我们识别出两种前馈控制形式之间的突然相变,这两种形式在预期负载力和施加的握力同步时间上有所不同。在刚度阈值水平处于100 - 200 N/m范围内的几次试验后发生了切换。这些结果表明,在握力控制中,大脑起到了一个切换控制系统的作用。这就开启了关于驱动切换的离散状态变量本质的新研究问题。