Department of Physical Therapy, Ibaraki Prefectural University of Health Sciences Hospital, 4773 Ami, Ami-machi, Inashiki-gun, Ibaraki, 300-0331, Japan.
Department of Orthopaedic Surgery, Ibaraki Prefectural University of Health Sciences, 4669-2 Ami, Ami-machi, Inashiki-gun, Ibaraki, 300-0394, Japan.
J Orthop Surg Res. 2018 Jul 3;13(1):163. doi: 10.1186/s13018-018-0875-1.
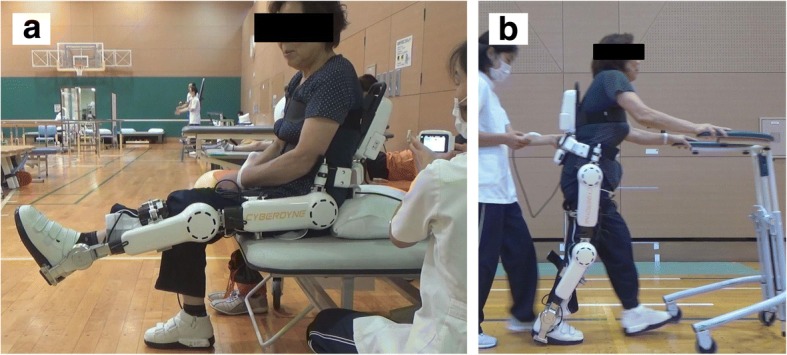
The Hybrid Assistive Limb (HAL, CYBERDYNE) is a wearable robot that provides assistance to patients while walking, standing, and performing leg movements based on the intended movement of the wearer. We aimed to assess the effect of HAL training on the walking ability, range of motion (ROM), and muscle strength of patients after total knee arthroplasty (TKA) for osteoarthritis and rheumatoid arthritis, and to compare the functional status after HAL training to the conventional training methods after surgery.
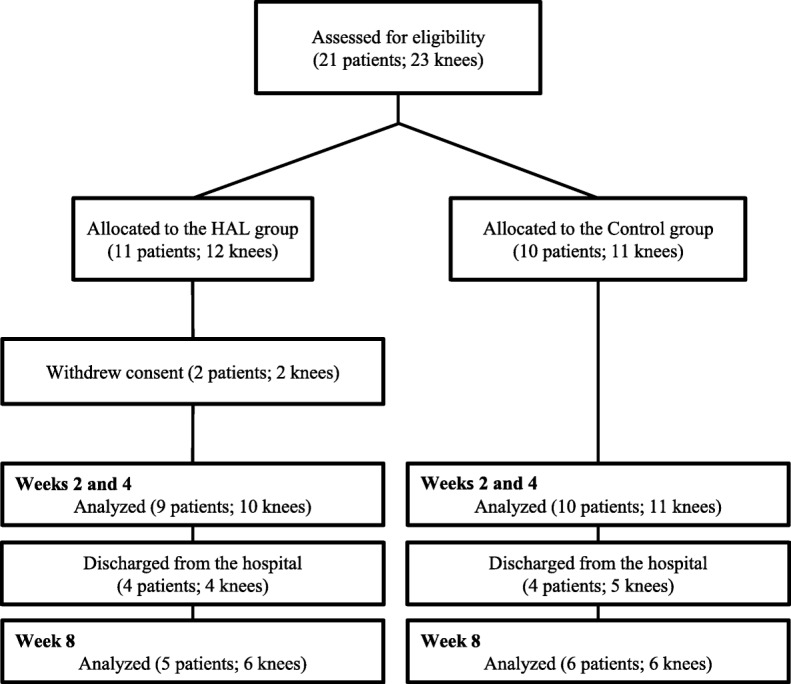
Nine patients (10 knees) underwent HAL training (mean age 74.1 ± 5.7 years; height 150.4 ± 6.5 cm; weight 61.2 ± 8.9 kg), whereas 10 patients (11 knees) underwent conventional rehabilitation (mean age 78.4 ± 8.0 years; height 150.5 ± 10.0 cm; weight 59.1 ± 9.8 kg). Patients underwent HAL training during 10 to 12 (average 14.4 min a session) sessions over a 4-week period, 1 week after TKA. There was no significant difference in the total physical therapy time including HAL training between the HAL and control groups. Gait speed, step length, ROM, and muscle strength were evaluated.
The nine patients completed the HAL training sessions without adverse events. The walking speed and step length in the self-selected walking speed condition, and the walking speed in the maximum walking speed condition were greater in the HAL group than in the control group at 4 and 8 weeks (P < 0.05). The step length in the maximum walking speed condition was greater in the HAL group than in the control group at 2, 4, and 8 weeks (P < 0.05). The extension lag and knee pain were lower in the HAL group than in the control group at 2 weeks (P < 0.05). The muscle strength of knee extension in the HAL group was greater than that in the control group at 8 weeks (P < 0.05).
HAL training after TKA can improve the walking ability, ROM, and muscle strength compared to conventional physical therapy for up to 8 weeks after TKA. Since the recovery of walking ability was earlier in the HAL group than in the control group and adverse events were not observed in this pilot study, HAL training after TKA can be considered a safe and effective rehabilitation intervention.
UMIN, UMIN000017623 . Registered 19 May 2015.
混合辅助肢体(HAL,Cyberdyne)是一种可穿戴机器人,它根据佩戴者的预期运动,在行走、站立和进行腿部运动时为患者提供辅助。我们旨在评估 HAL 训练对骨关节炎和类风湿性关节炎全膝关节置换术(TKA)后患者行走能力、关节活动度(ROM)和肌肉力量的影响,并将 HAL 训练后的功能状态与手术后的常规训练方法进行比较。
9 名患者(10 膝)接受 HAL 训练(平均年龄 74.1±5.7 岁;身高 150.4±6.5cm;体重 61.2±8.9kg),10 名患者(11 膝)接受常规康复(平均年龄 78.4±8.0 岁;身高 150.5±10.0cm;体重 59.1±9.8kg)。HAL 组患者在 TKA 后 1 周内进行 10 至 12 次(平均每次 14.4 分钟)、为期 4 周的 HAL 训练,共进行 10 至 12 次(平均每次 14.4 分钟)。HAL 组和对照组的总物理治疗时间(包括 HAL 训练)无显著差异。评估步态速度、步长、ROM 和肌肉力量。
9 名患者在无不良反应的情况下完成了 HAL 训练课程。在 4 周和 8 周时,HAL 组在自主选择的步行速度条件下的步行速度和步长,以及最大步行速度条件下的步行速度均大于对照组(P<0.05)。在 2、4 和 8 周时,HAL 组在最大步行速度条件下的步长大于对照组(P<0.05)。在 2 周时,HAL 组的伸展滞后和膝关节疼痛低于对照组(P<0.05)。在 8 周时,HAL 组的膝关节伸展肌力大于对照组(P<0.05)。
与 TKA 后常规物理治疗相比,TKA 后进行 HAL 训练可在 TKA 后长达 8 周内改善步行能力、ROM 和肌肉力量。由于 HAL 组的步行能力恢复早于对照组,且本试验未观察到不良事件,因此 TKA 后进行 HAL 训练可被视为一种安全有效的康复干预措施。
UMIN,UMIN000017623。注册于 2015 年 5 月 19 日。