Department of Computer Science, Universidad Autónoma de Madrid, 28049 Madrid, Spain.
Sensors (Basel). 2018 Jul 18;18(7):2339. doi: 10.3390/s18072339.
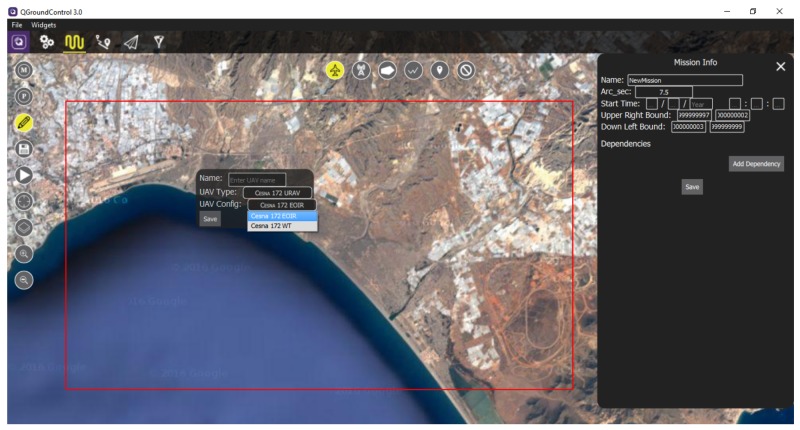
Unmanned Aerial Vehicles (UAVs) have become very popular in the last decade due to some advantages such as strong terrain adaptation, low cost, zero casualties, and so on. One of the most interesting advances in this field is the automation of mission planning (task allocation) and real-time replanning, which are highly useful to increase the autonomy of the vehicle and reduce the operator workload. These automated mission planning and replanning systems require a Human Computer Interface (HCI) that facilitates the visualization and selection of plans that will be executed by the vehicles. In addition, most missions should be assessed before their real-life execution. This paper extends QGroundControl, an open-source simulation environment for flight control of multiple vehicles, by adding a mission designer that permits the operator to build complex missions with tasks and other scenario items; an interface for automated mission planning and replanning, which works as a test bed for different algorithms, and a Decision Support System (DSS) that helps the operator in the selection of the plan. In this work, a complete guide of these systems and some practical use cases are provided.
在过去的十年中,由于一些优势,例如强大的地形适应性、低成本、零伤亡等,无人飞行器(UAV)变得非常流行。在该领域最有趣的进展之一是任务规划(任务分配)和实时重新规划的自动化,这对于提高车辆的自主性和降低操作人员的工作量非常有用。这些自动化的任务规划和重新规划系统需要一个人机界面(HCI),以方便可视化和选择将由车辆执行的计划。此外,大多数任务在实际执行之前都应该进行评估。本文通过添加任务设计器来扩展 QGroundControl,这是一个用于多辆飞行器飞行控制的开源模拟环境,该任务设计器允许操作员使用任务和其他场景项构建复杂任务;添加了一个用于自动化任务规划和重新规划的接口,它可作为不同算法的测试平台,以及一个决策支持系统(DSS),帮助操作员选择计划。在这项工作中,提供了这些系统的完整指南和一些实际用例。