Coordinative Innovation Center of Taiyuan Heavy Machinery Equipment, Taiyuan University of Science and Technology, Taiyuan 030024, China.
School of Mechanical, Materials, Mechatronic and Biomedical Engineering, University of Wollongong, Wollongong, NSW 2522, Australia.
Sensors (Basel). 2018 Sep 10;18(9):3024. doi: 10.3390/s18093024.
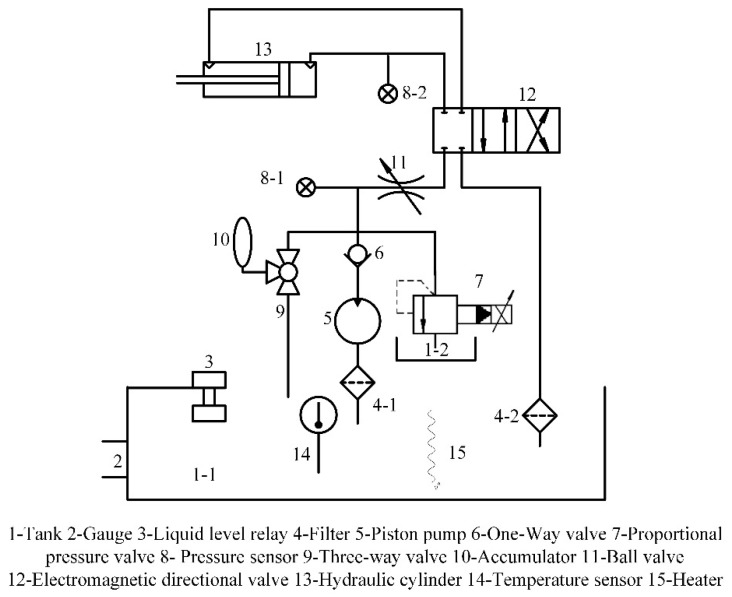
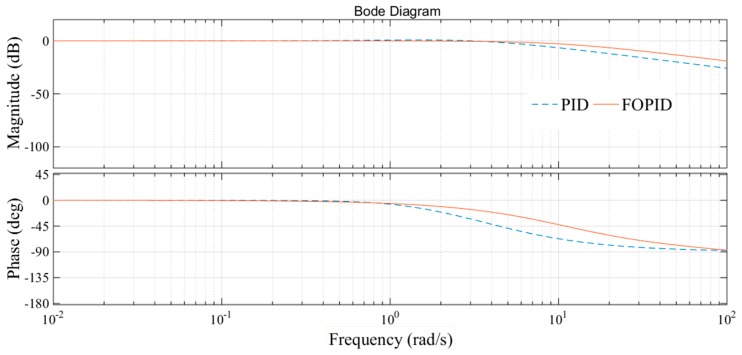
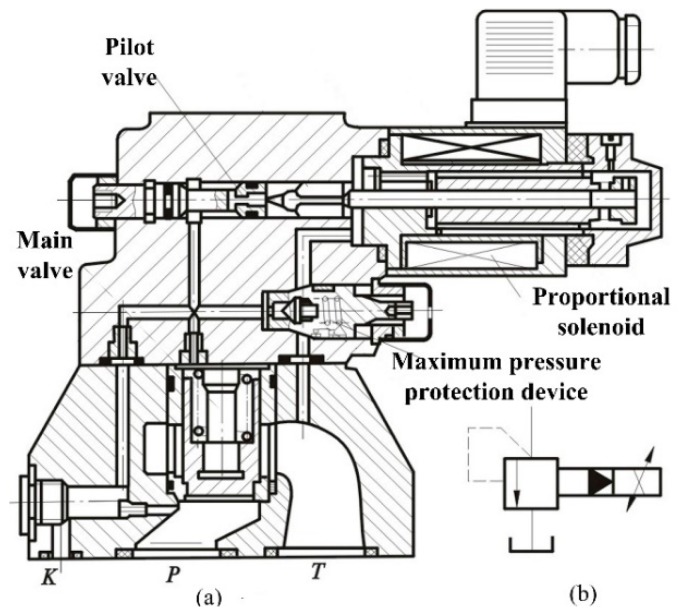
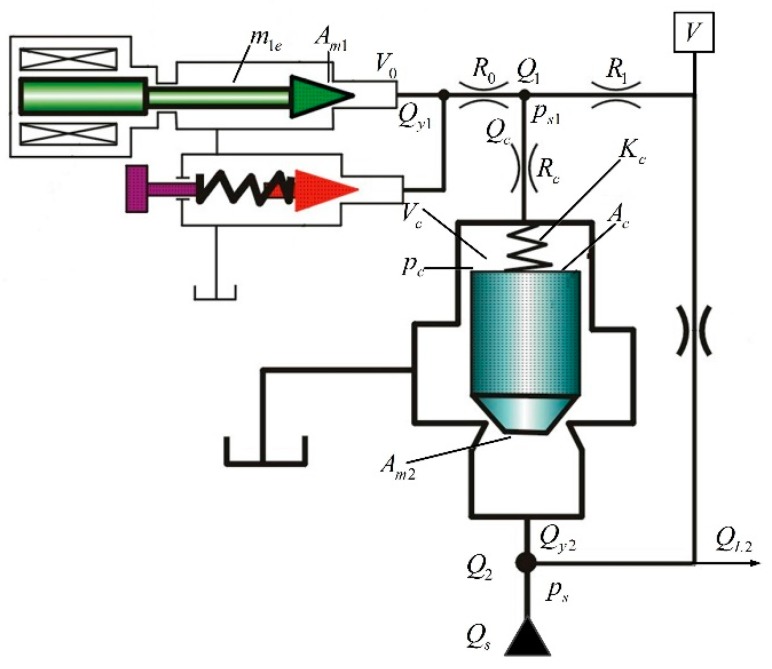
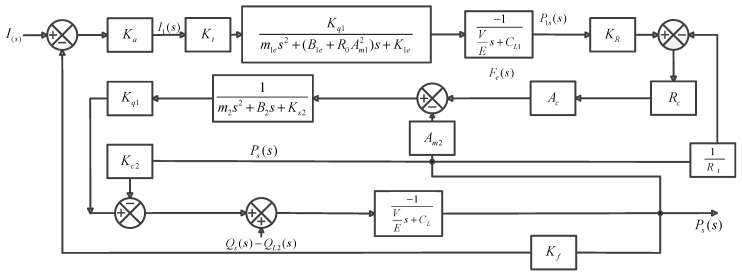
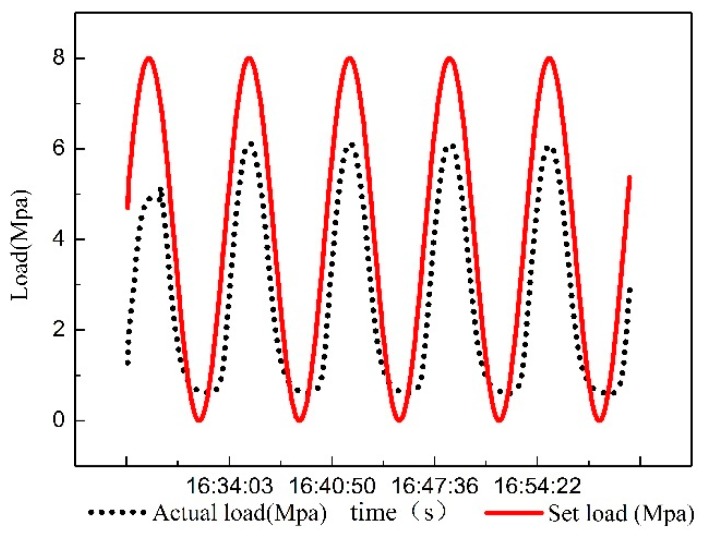
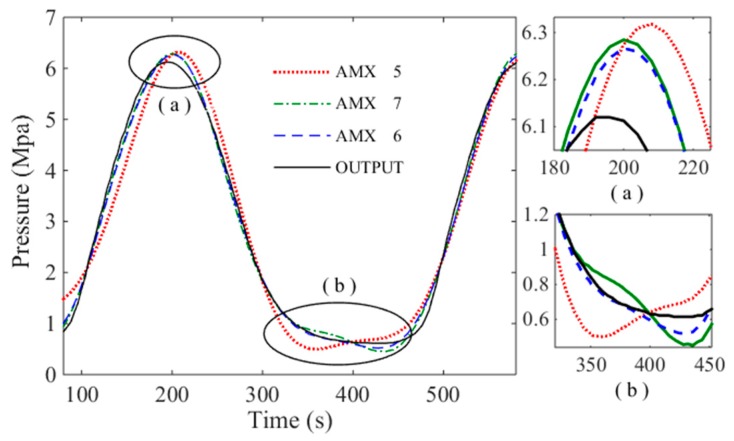
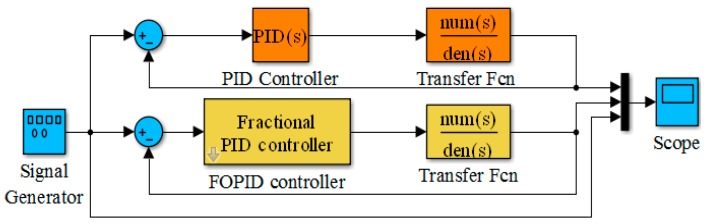
In this paper, a control method for a hydraulic loading system of an electromechanical platform based on a fractional-order PID (Proportion-Integration-Differentiation) controller is proposed, which is used to drive the loading system of a mechatronic journal test rig. The mathematical model of the control system is established according to the principle of the electro-hydraulic system. Considering the indetermination of model parameters, the method of parameter identification was used to verify the rationality of the theoretical model. In order to improve the control precision of the hydraulic loading system, the traditional PID controller and fractional-order PID controller are designed by selecting appropriate tuning parameters. Their control performances are analyzed in frequency domain and time domain, respectively. The results show that the fractional-order PID controller has better control effect. By observing the actual control effect of the fractional-order PID controller on the journal test rig, the effectiveness of this control algorithm is verified.
本文提出了一种基于分数阶 PID(比例-积分-微分)控制器的机电平台液压加载系统的控制方法,用于驱动机电轴颈试验台的加载系统。根据电液系统的原理,建立了控制系统的数学模型。考虑到模型参数的不确定性,采用参数辨识的方法验证了理论模型的合理性。为了提高液压加载系统的控制精度,通过选择适当的整定参数,设计了传统 PID 控制器和分数阶 PID 控制器。分别在频域和时域内对它们的控制性能进行了分析。结果表明,分数阶 PID 控制器具有更好的控制效果。通过观察分数阶 PID 控制器对轴颈试验台的实际控制效果,验证了该控制算法的有效性。