Fan Yuqi, Shao Junpeng, Sun Guitao
School of Mechanical and Power Engineering, Harbin University of Science and Technology, Harbin 150080, China.
Sensors (Basel). 2019 Jun 18;19(12):2727. doi: 10.3390/s19122727.
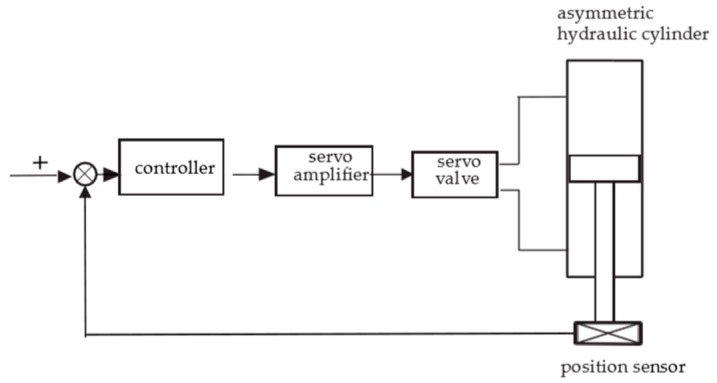
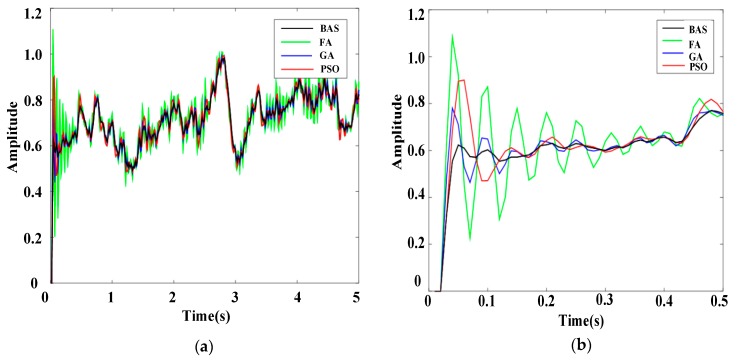
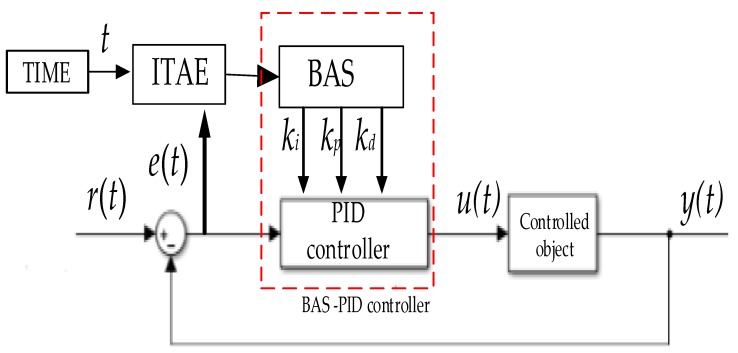
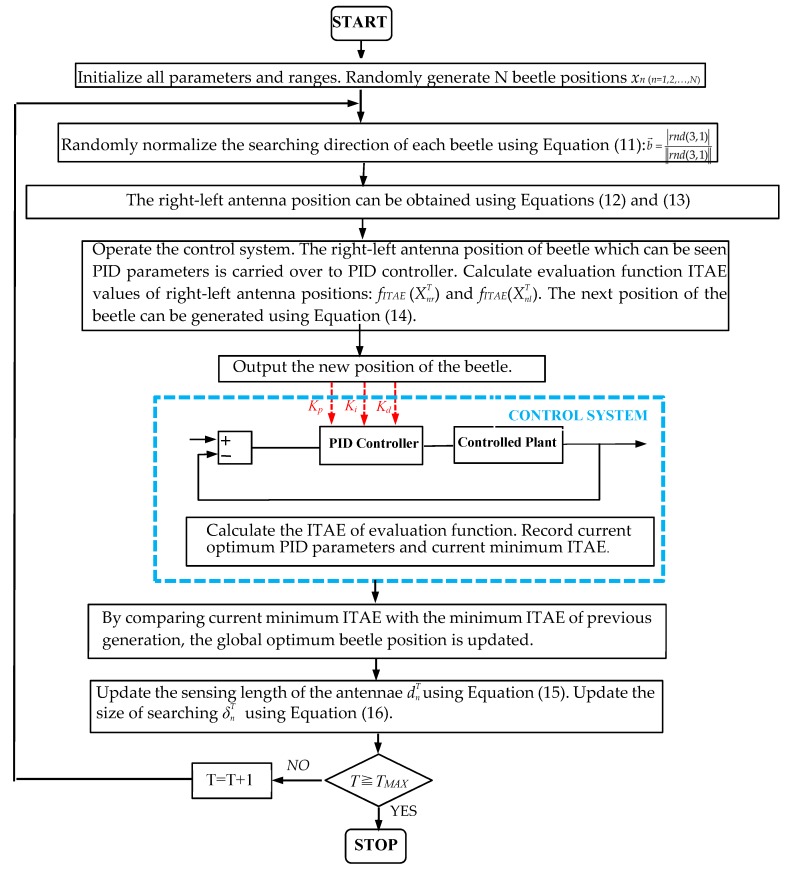
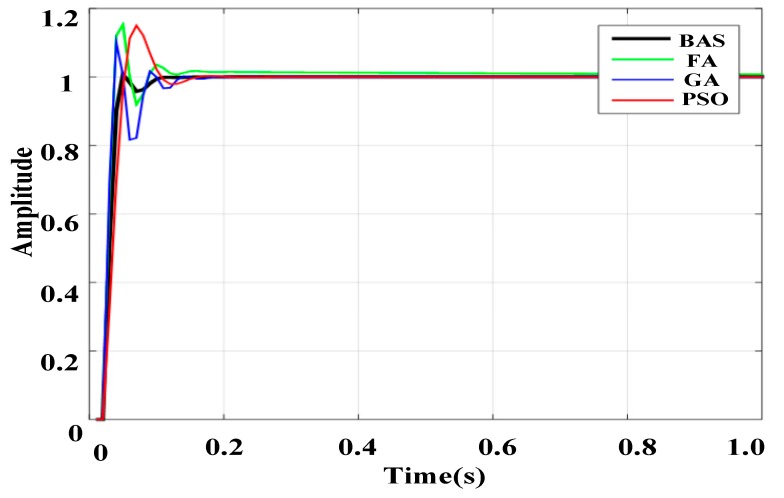
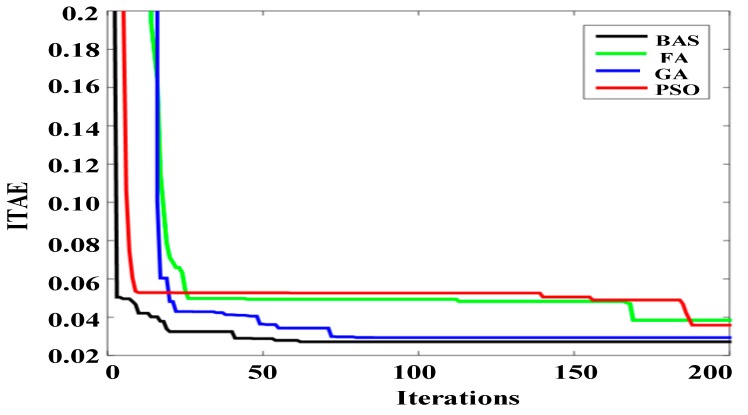
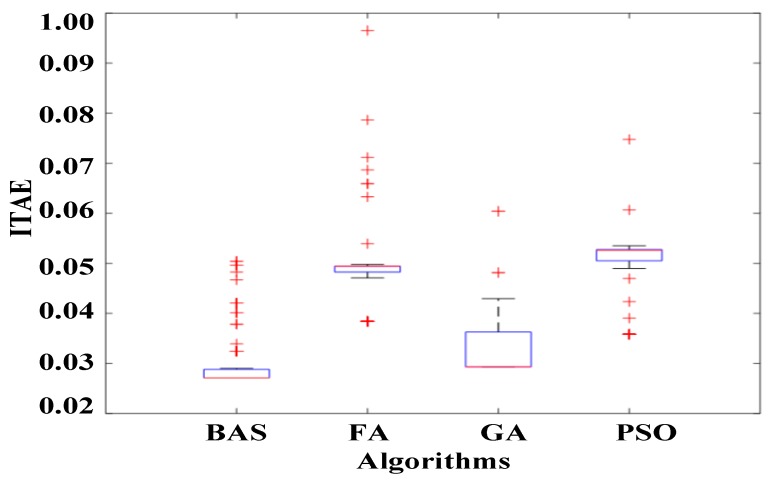
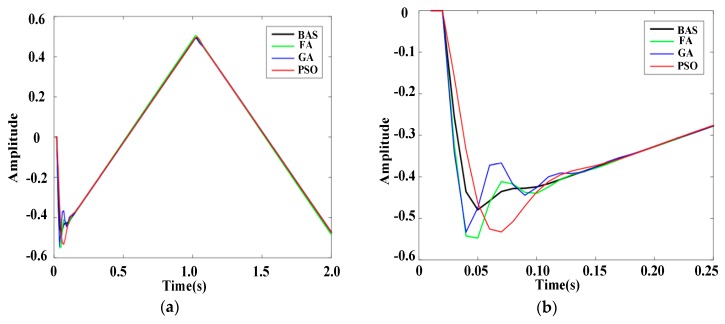
To improve the controllability of an electro-hydraulic position servo control system while simultaneously enhancing the anti-jamming ability of a PID controller, a compound PID controller that combines the beetle antennae search algorithm with PID strategy was proposed, and used to drive the position servo control system of the electro-hydraulic servo system. A BAS-PID controller was designed, and the beetle antennae search algorithm was used to tune PID parameters so that the disturbance signal of the system was effectively restrained. Initially, the basic mathematical model of the electro-hydraulic position servo control system was established through theoretical analysis. The transfer function model was obtained by identifying system parameters. Then, the PID parameter-tuning problem was converted into a class of three-dimensional parameter optimization problem, and gains of PID controllers were adjusted using the beetle antennae search algorithm. Finally, by comparing the effectiveness of different algorithms, simulation and experimental results revealed that the BAS-PID controller can greatly enhance the performance of the electro-hydraulic position servo control system and inhibit external disturbances when different interference signals are used to test the system's robustness.
为了提高电液位置伺服控制系统的可控性,同时增强PID控制器的抗干扰能力,提出了一种将甲虫触角搜索算法与PID策略相结合的复合PID控制器,并将其用于驱动电液伺服系统的位置伺服控制系统。设计了一种BAS-PID控制器,利用甲虫触角搜索算法对PID参数进行整定,从而有效抑制系统的干扰信号。首先,通过理论分析建立了电液位置伺服控制系统的基本数学模型。通过系统参数辨识得到传递函数模型。然后,将PID参数整定问题转化为一类三维参数优化问题,并利用甲虫触角搜索算法调整PID控制器的增益。最后,通过比较不同算法的有效性,仿真和实验结果表明,当使用不同干扰信号测试系统鲁棒性时,BAS-PID控制器能够大大提高电液位置伺服控制系统的性能并抑制外部干扰。