Key Laboratory of Advanced Process Control for Light Industry, Ministry of Education, Jiangnan University, Wuxi 214122, China.
USDA/ARS Environmental Microbial and Food Safety Laboratory, Beltsville Agricultural Research Center, Bldg., 303, BARC-East, 10300 Baltimore Ave., Beltsville, MD 20705-2350, USA.
Sensors (Basel). 2018 Sep 13;18(9):3083. doi: 10.3390/s18093083.
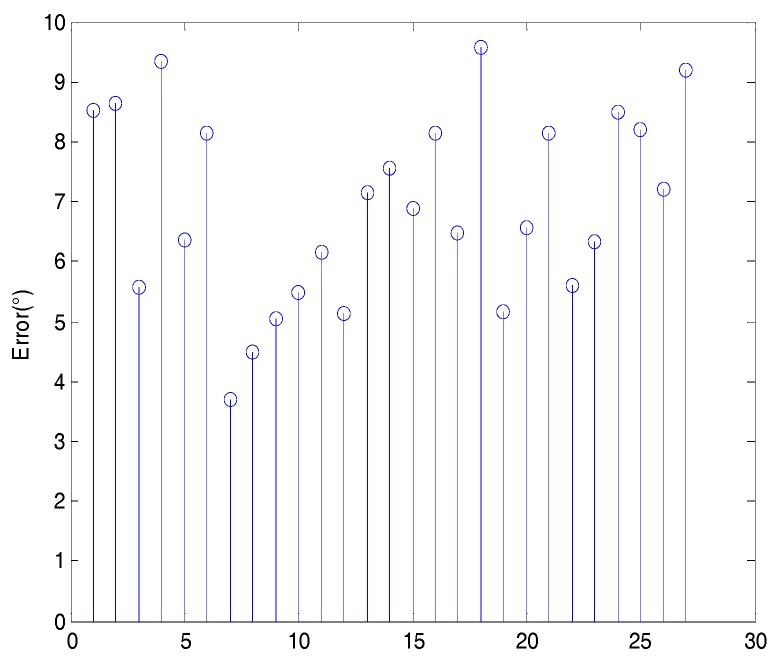
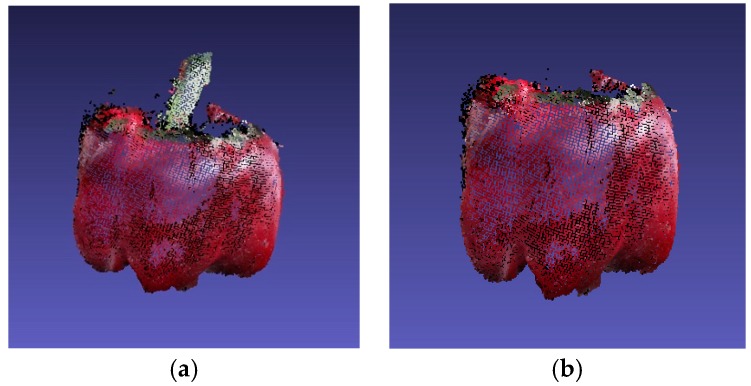
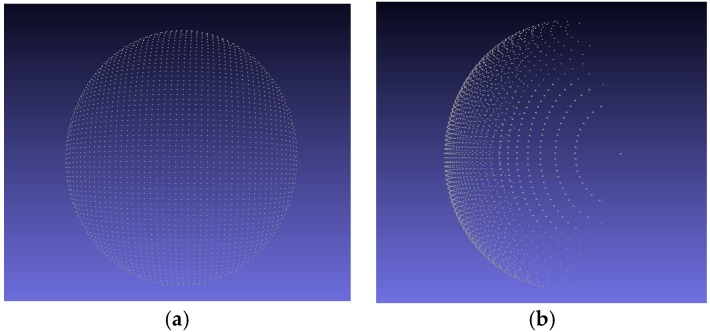
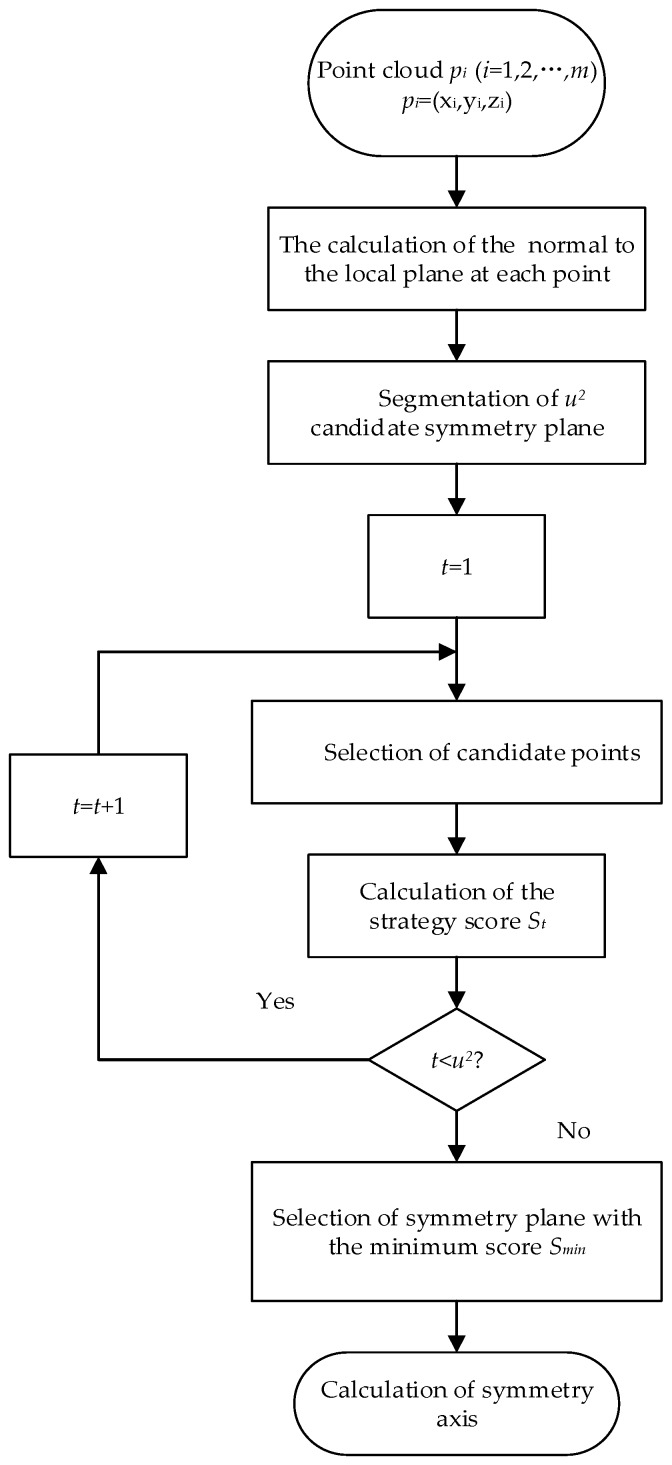
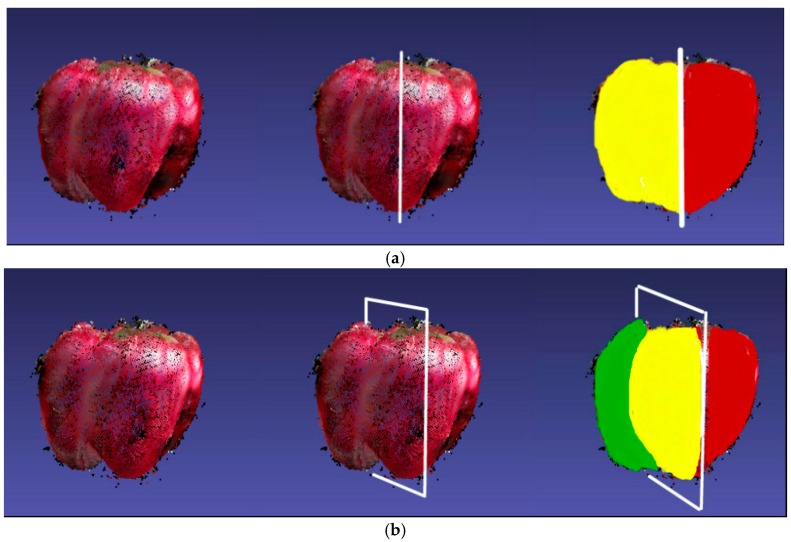
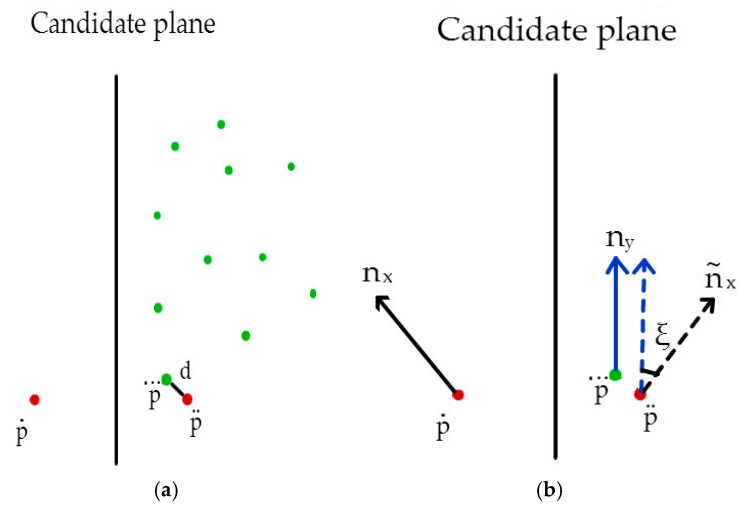
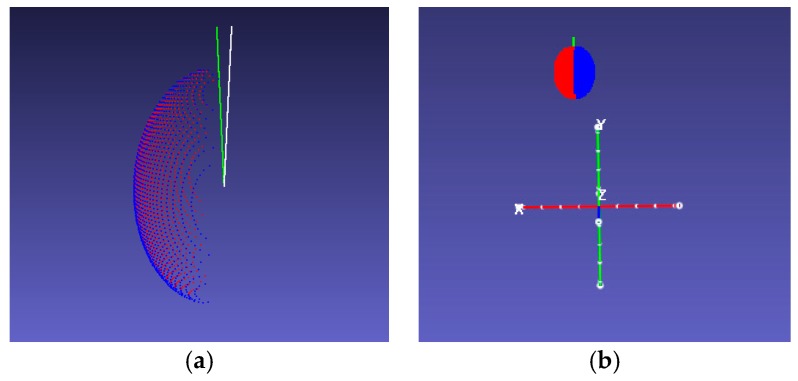
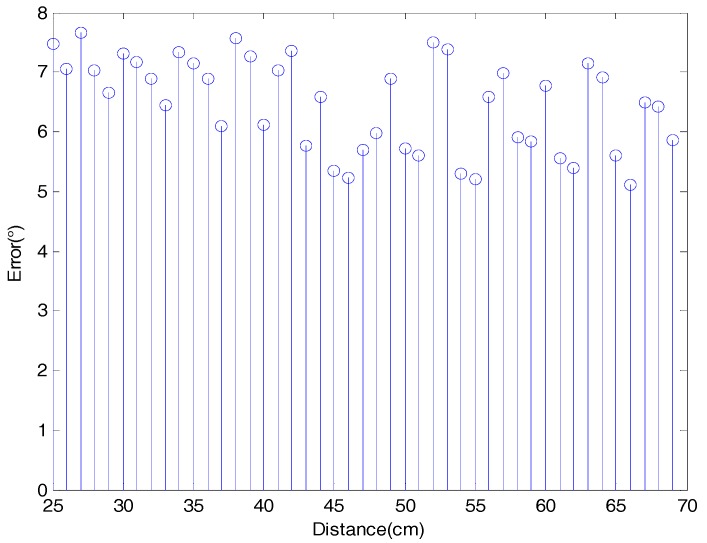
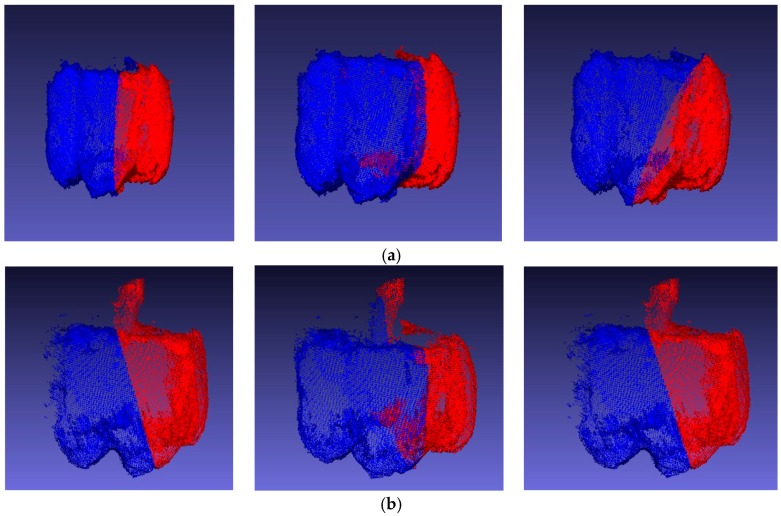
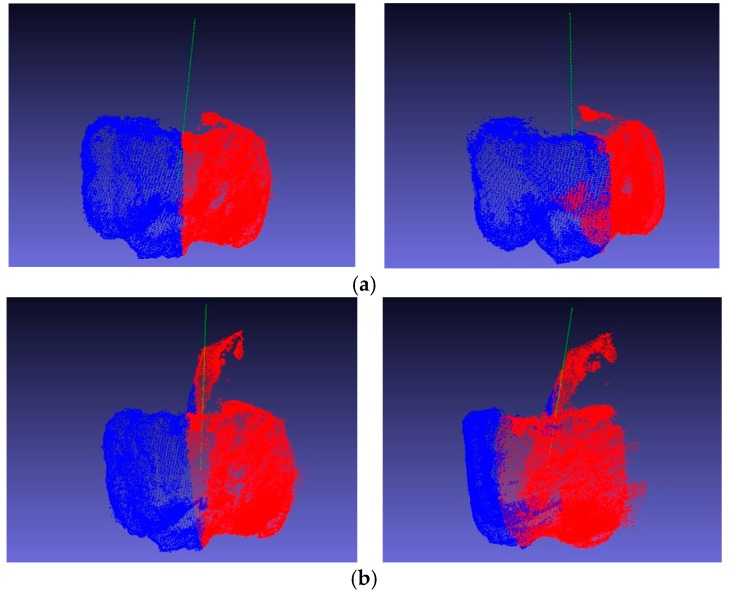
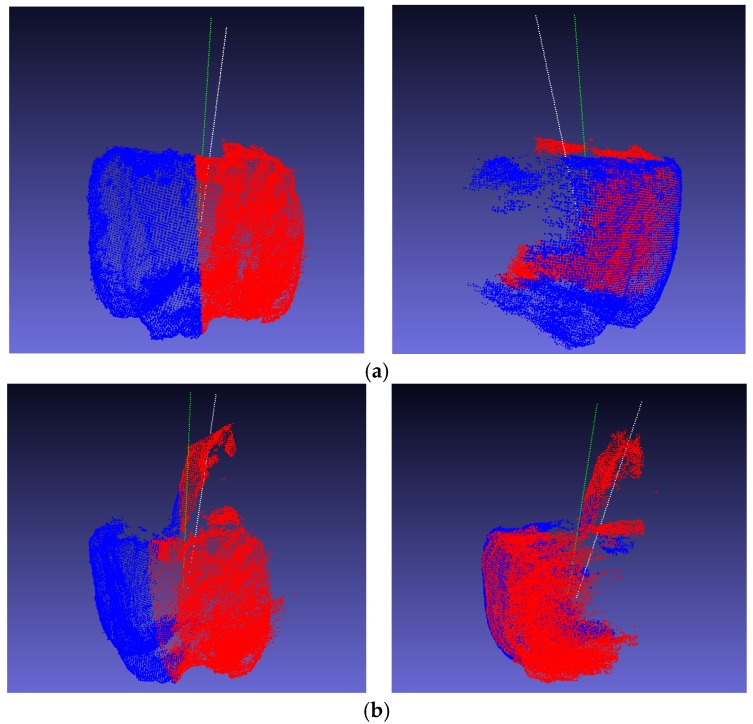
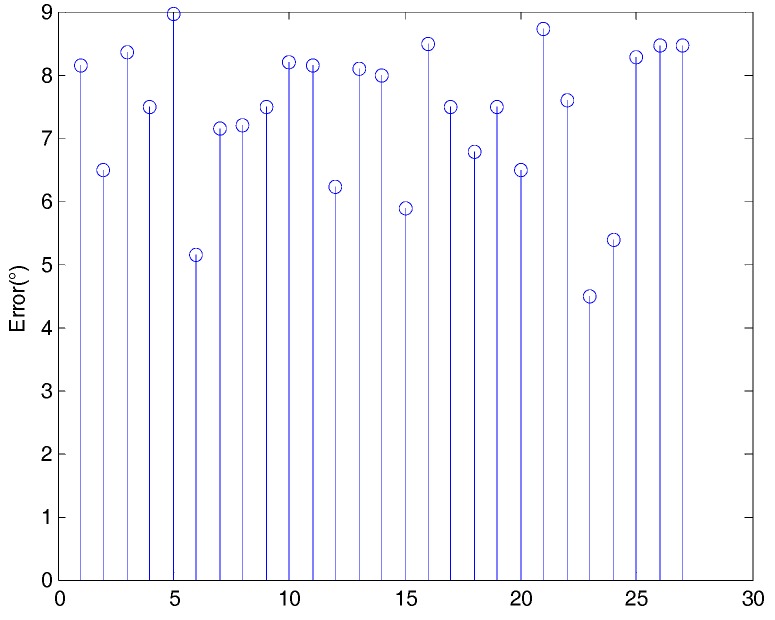
The space pose of fruits is necessary for accurate detachment in automatic harvesting. This study presents a novel pose estimation method for sweet pepper detachment. In this method, the normal to the local plane at each point in the sweet-pepper point cloud was first calculated. The point cloud was separated by a number of candidate planes, and the scores of each plane were then separately calculated using the scoring strategy. The plane with the lowest score was selected as the symmetry plane of the point cloud. The symmetry axis could be finally calculated from the selected symmetry plane, and the pose of sweet pepper in the space was obtained using the symmetry axis. The performance of the proposed method was evaluated by simulated and sweet-pepper cloud dataset tests. In the simulated test, the average angle error between the calculated symmetry and real axes was approximately 6.5°. In the sweet-pepper cloud dataset test, the average error was approximately 7.4° when the peduncle was removed. When the peduncle of sweet pepper was complete, the average error was approximately 6.9°. These results suggested that the proposed method was suitable for pose estimation of sweet peppers and could be adjusted for use with other fruits and vegetables.
果实的空间姿态对于自动采摘的准确分离是必要的。本研究提出了一种用于甜椒分离的新姿态估计方法。在该方法中,首先计算甜椒点云中每个点的局部平面的法向。通过若干候选平面对点云进行分离,然后使用评分策略分别计算每个平面的得分。选择得分最低的平面作为点云的对称平面。最后,从选定的对称平面中计算对称轴,并使用对称轴获得甜椒在空间中的姿态。通过模拟和甜椒云数据集测试评估了所提出方法的性能。在模拟测试中,计算出的对称轴与真实轴之间的平均角度误差约为 6.5°。在甜椒云数据集测试中,当去除花梗时,平均误差约为 7.4°。当甜椒的花梗完整时,平均误差约为 6.9°。这些结果表明,所提出的方法适用于甜椒的姿态估计,并且可以针对其他水果和蔬菜进行调整。