Department of Automation, 4139, Building No. 61, Harbin Engineering University, Nan Tong No. 145, Harbin 150001, China.
Sensors (Basel). 2018 Oct 8;18(10):3355. doi: 10.3390/s18103355.
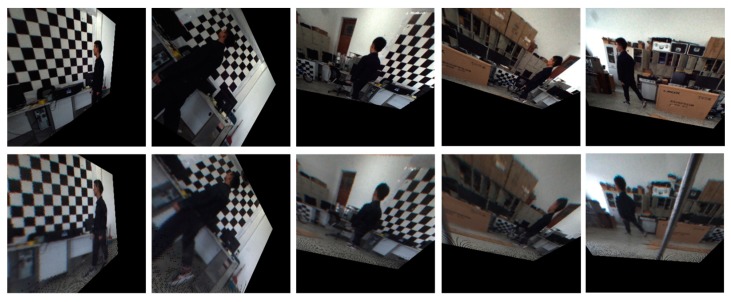
By combining the advantages of 360-degree field of view cameras and the high resolution of conventional cameras, the hybrid stereo vision system could be widely used in surveillance. As the relative position of the two cameras is not constant over time, its automatic rectification is highly desirable when adopting a hybrid stereo vision system for practical use. In this work, we provide a method for rectifying the dynamic hybrid stereo vision system automatically. A perspective projection model is proposed to reduce the computation complexity of the hybrid stereoscopic 3D reconstruction. The rectification transformation is calculated by solving a nonlinear constrained optimization problem for a given set of corresponding point pairs. The experimental results demonstrate the accuracy and effectiveness of the proposed method.
通过结合 360 度全景摄像机的优势和传统摄像机的高分辨率,混合立体视觉系统可以广泛应用于监控领域。由于两个摄像机的相对位置随时间而变化,因此在实际应用中采用混合立体视觉系统时,非常需要自动校正。在这项工作中,我们提供了一种自动校正动态混合立体视觉系统的方法。提出了一种透视投影模型来降低混合立体三维重建的计算复杂度。通过求解给定对应点对集的非线性约束优化问题来计算校正变换。实验结果证明了所提出方法的准确性和有效性。