Department of Bioengineering, The University of Texas at Dallas, Richardson, Texas, United States of America.
Department of Mechanical Engineering, Colorado School of Mines, Golden, Colorado, United States of America.
PLoS One. 2018 Nov 5;13(11):e0206875. doi: 10.1371/journal.pone.0206875. eCollection 2018.
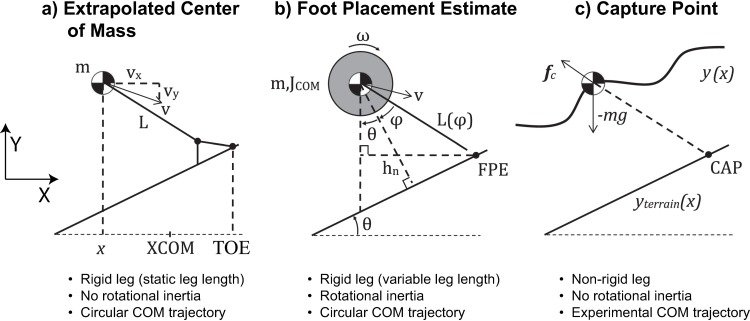
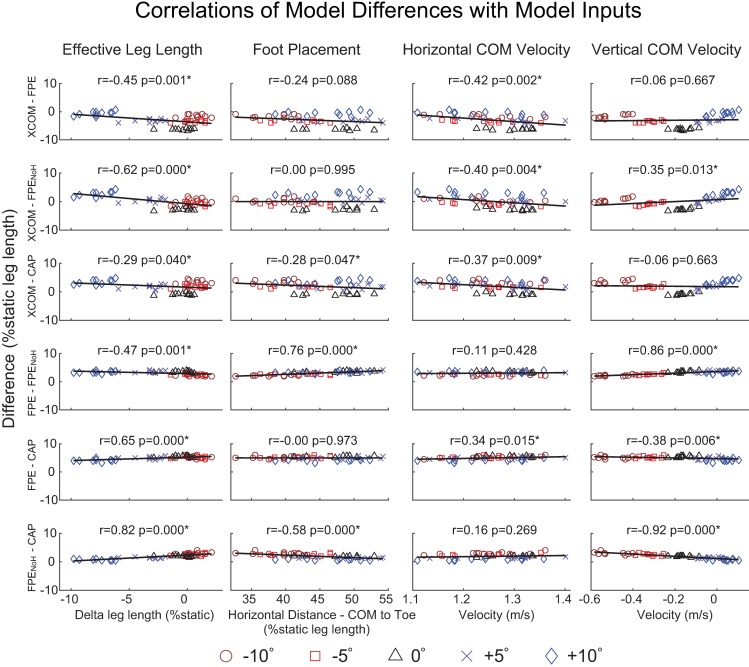
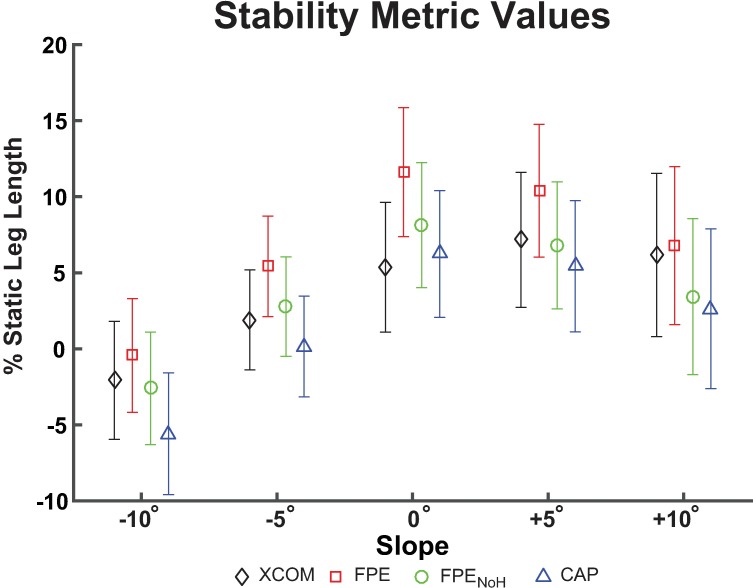
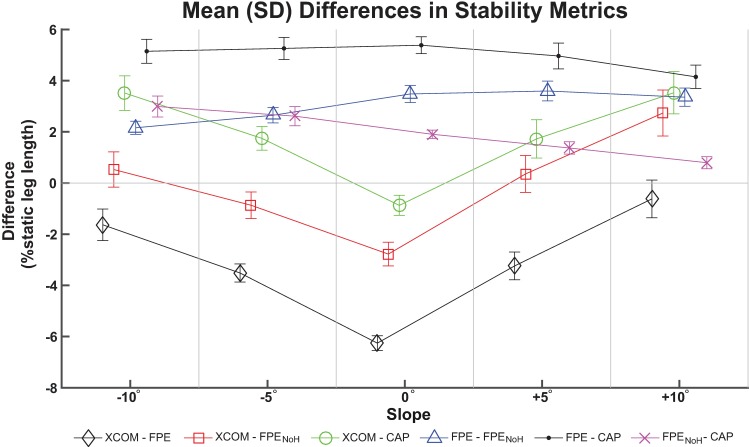
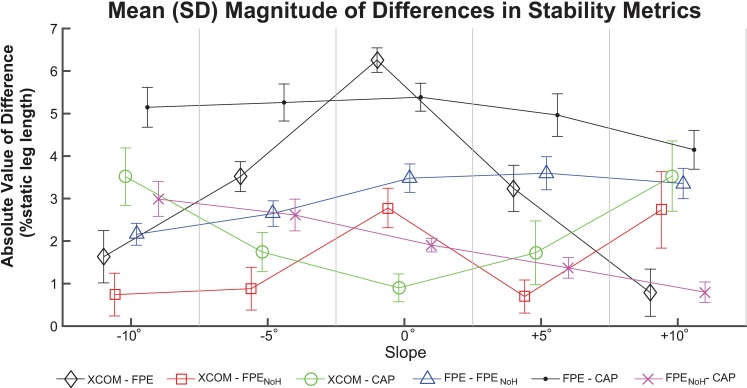
Maintaining balance on ramps is important for mobility. However, balance is commonly assessed using inverted pendulum-based metrics (e.g., margin of stability), which may not be appropriate for assessment of human walking on non-level surfaces. To investigate this, we analyzed stability on ramps using four different inverted pendulum models: extrapolated center of mass (XCOM), foot placement estimate (FPE), foot placement estimate neglecting angular momentum (FPENoH), and capture point (CAP). We analyzed experimental data from 10 able-bodied individuals walking on a ramp at 0°, ±5°, and ±10°. Contrary to our hypothesis that the magnitude of differences between metrics would be greatest at ±10°, we observed the greatest magnitude of differences between metrics at 0°. In general, the stability metrics were bounded by FPE and CAP at each slope, consistent with prior studies of level walking. Our results also suggest that clinical providers and researchers should be aware that assessments that neglect angular momentum (e.g., margin of stability, XCOM) may underestimate stability in the sagittal-plane in comparison to analyses which incorporate angular momentum (e.g., FPE). Except for FPENoH-CAP (r = 0.82), differences between metrics were only moderately correlated (|r|≤0.65) with violations of leg length assumptions in the underlying inverted pendulum models. The differences in FPENoH relative to FPE and CAP were strongly correlated with body center of mass vertical velocity (max |r| = 0.92), suggesting that model representations of center of mass motion influence stability metrics. However, there was not a clear overall relationship between model inputs and differences in stability metrics. Future sensitivity analyses may provide additional insight into model characteristics that influence stability metrics.
在斜坡上保持平衡对于行动能力很重要。然而,平衡通常是通过基于倒立摆的指标(例如,稳定裕度)来评估的,而这些指标可能不适合评估人类在非水平表面上的行走。为了研究这个问题,我们使用了四个不同的倒立摆模型(外推质心(XCOM)、脚放置估计(FPE)、忽略角动量的脚放置估计(FPENoH)和捕获点(CAP))来分析斜坡上的稳定性。我们分析了 10 名健康个体在 0°、±5°和±10°的斜坡上行走的实验数据。与我们的假设相反,即指标之间的差异幅度在±10°时最大,我们在 0°时观察到了最大的差异幅度。一般来说,在每个坡度下,稳定性指标都被 FPE 和 CAP 所限制,这与之前对水平行走的研究一致。我们的结果还表明,临床医生和研究人员应该意识到,忽略角动量的评估(例如,稳定裕度、XCOM)可能会低估矢状面的稳定性,与纳入角动量的分析(例如,FPE)相比。除了 FPENoH-CAP(r = 0.82)之外,指标之间的差异仅与基础倒立摆模型中腿长假设的违反程度中度相关(|r|≤0.65)。与 FPE 和 CAP 相比,FPENoH 的差异与身体质心垂直速度高度相关(max |r| = 0.92),这表明质心运动的模型表示影响稳定性指标。然而,在模型输入和稳定性指标之间没有明显的整体关系。未来的敏感性分析可能会提供更多关于影响稳定性指标的模型特征的见解。