Web Engineering and Early Testing (IWT2) research group, Departamento de Lenguajes y Sistemas Informáticos, Escuela Técnica Superior de Ingeniería Informática, Universidad de Sevilla, Avda. Reina Mercedes s/n, 41012 Seville, Spain.
Departamento de Informática Centro de Tecnologia, Universidade Estadual de Maringá, Av. Colombo, 5790 - Jd. Universitário, Maringá 87020-900, Brazil.
Sensors (Basel). 2019 Feb 27;19(5):1020. doi: 10.3390/s19051020.
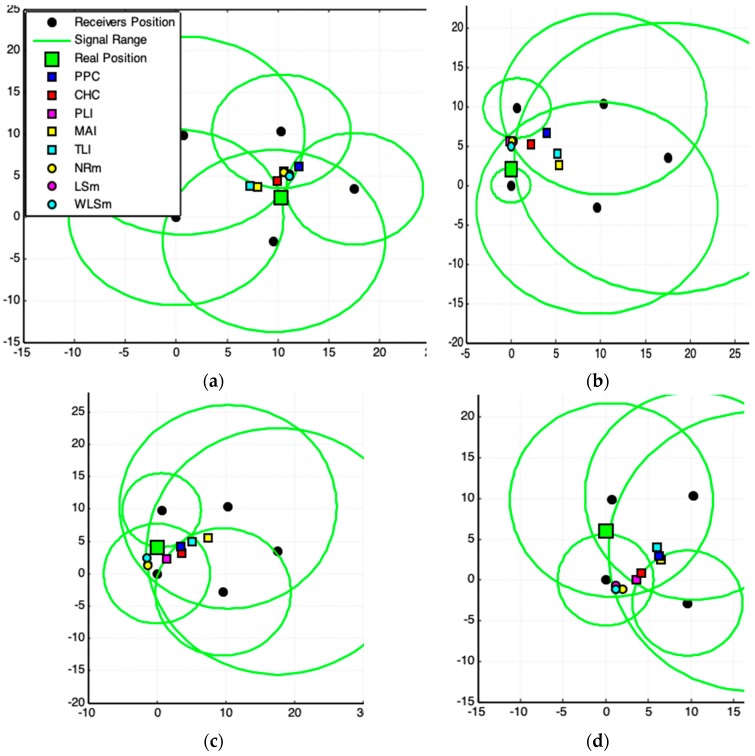
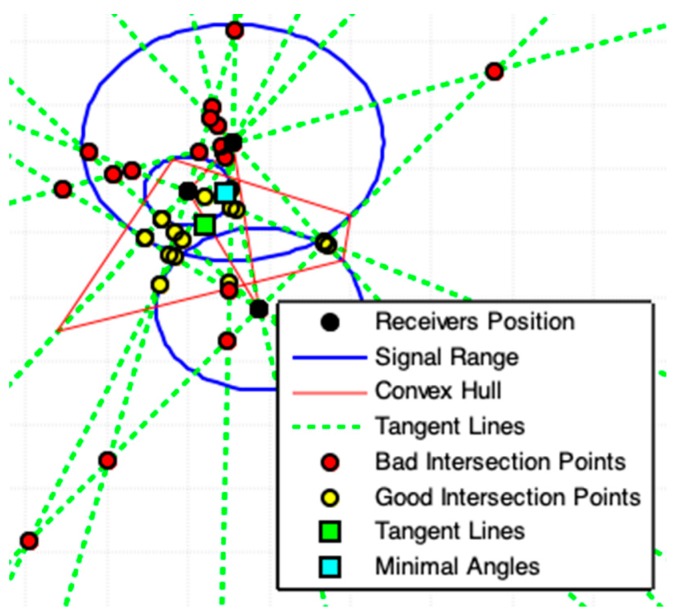
The 2D point location problem has applications in several areas, such as geographic information systems, navigation systems, motion planning, mapping, military strategy, location and tracking moves. We aim to present a new approach that expands upon current techniques and methods to locate the 2D position of a signal source sent by an emitter device. This new approach is based only on the geometric relationship between an emitter device and a system composed of m≥2 signal receiving devices. Current approaches applied to locate an emitter can be deterministic, statistical or machine-learning methods. We propose to perform this triangulation by geometric models that exploit elements of pole-polar geometry. For this purpose, we are presenting five geometric models to solve the point location problem: (1) based on centroid of points of pole-polar geometry, PPC; (2) based on convex hull region among pole-points, CHC; (3) based on centroid of points obtained by polar-lines intersections, PLI; (4) based on centroid of points obtained by tangent lines intersections, TLI; (5) based on centroid of points obtained by tangent lines intersections with minimal angles, MAI. The first one has computational cost On and whereas has the computational cost Onlognwhere n is the number of points of interest.
二维点定位问题在多个领域有应用,例如地理信息系统、导航系统、运动规划、映射、军事策略、位置和跟踪运动。我们旨在提出一种新的方法,该方法扩展了当前的技术和方法,以定位由发射器设备发送的信号源的二维位置。这种新方法仅基于发射器设备和由 m≥2 个信号接收设备组成的系统之间的几何关系。当前应用于定位发射器的方法可以是确定性的、统计性的或机器学习方法。我们提议通过利用极极几何元素的几何模型来执行这种三角测量。为此,我们提出了五个解决点定位问题的几何模型:(1)基于极点极线几何的质心,PPC;(2)基于极点点之间的凸包区域,CHC;(3)基于极线交点的点的质心,PLI;(4)基于切线交点的点的质心,TLI;(5)基于切线与最小角交点的点的质心,MAI。第一个模型的计算成本为 On,而第二个模型的计算成本为 Onlogn,其中 n 是感兴趣的点数。