Lee Jung Ho, Shin Beomju, Shin Donghyun, Park Jinwoo, Ryu Yong Sang, Woo Deok Ha, Lee Taikjin
Sensor System Research Center, Korea Institute of Science and Technology, 5, Hwarang-ro 14-gil, Seongbuk-gu, Seoul 02972, Korea.
Department of Electrical and Computer Engineering, Korea University, Anam-dong, Seungbuk-gu, Seoul 136-713, Korea.
Sensors (Basel). 2019 Jul 29;19(15):3325. doi: 10.3390/s19153325.
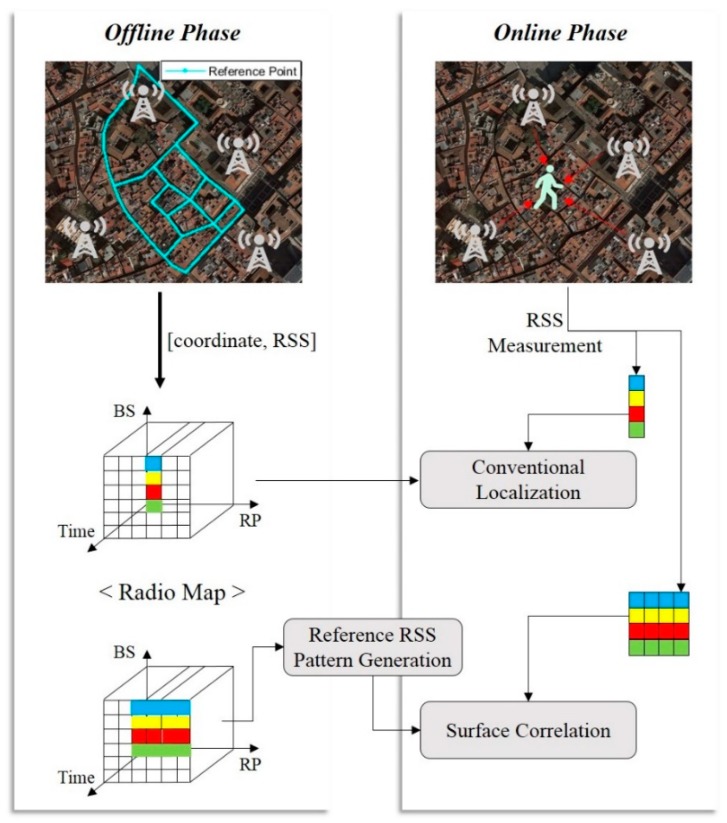
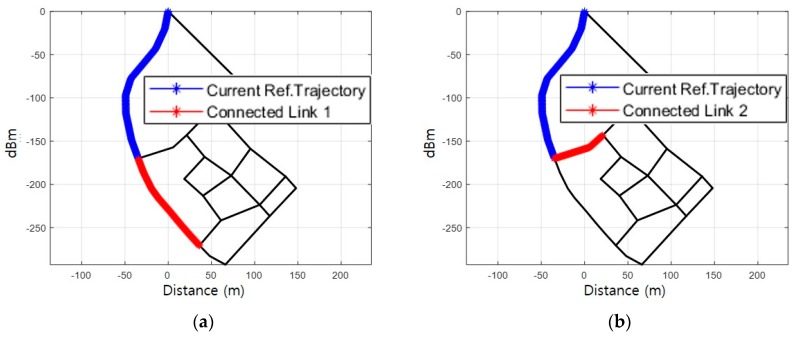
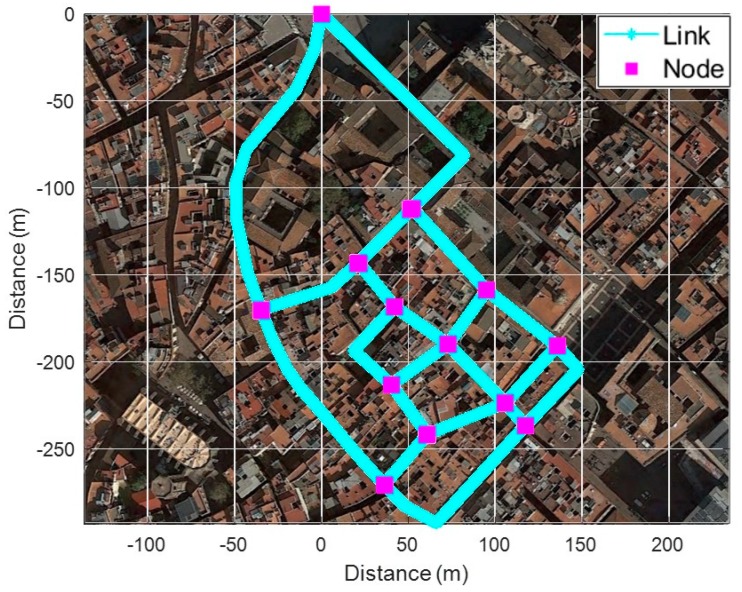
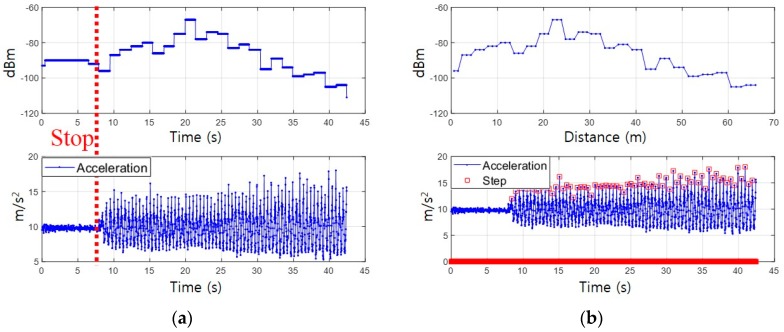
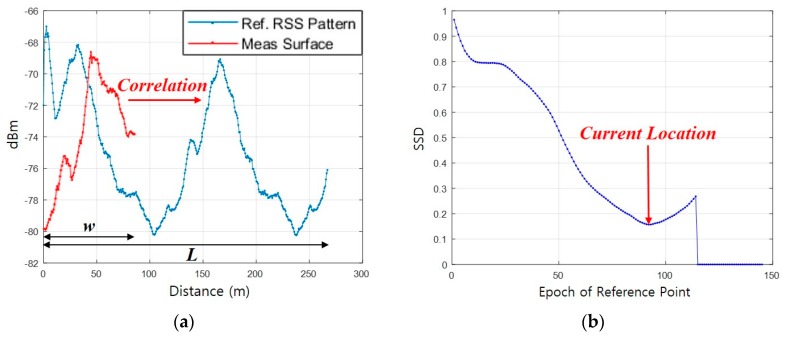
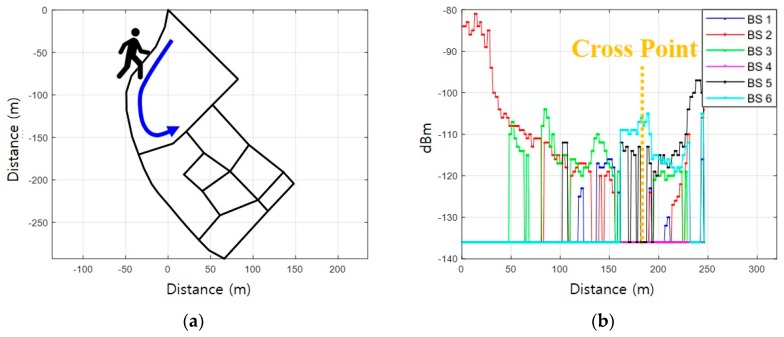
The Global Satellite Navigation System (GNSS) used in various location-based services is accurate and stable in outdoor environments. However, it cannot be utilized in an indoor environment because of low signal availability and degradation of accuracy due to the multipath distortion of satellite signals in urban areas. On the contrary, LTE signals are available almost everywhere in urban areas and are quite stable without much variation throughout the year. This is because of the fixed location of base stations and the well-maintained policy of mobile communication service providers. Its varied stability and reliability make LTE signals a more viable method for localization. However, there are some complexities in utilizing LTE signals including signal interference distortion phenomena during propagation multipath fading, and various types of noise. In this paper, we propose a surface correlation-based fingerprinting method to utilize LTE signals for localization in urban areas. The surface correlation converts timely measured signal strength into spatial pattern using the walking distance from a Pedestrian Dead-Reckoning (PDR). The surface correlation is carried out by comparing the spatial signal strength pattern of a pedestrian`s movement trajectory with a fingerprinting database to estimate the location. A reference trajectory of the moving pedestrian is chosen to have a greater correlation among the multiple trajectory candidates generated from a link-based fingerprinting database. By comparing spatial signal strength patterns, the proposed method can improve robustness in localization overcoming the accuracy degradation problem due to RF multipath and noise that are dominant in the conventional RSS measurement-based LTE localization scheme. The test results in urban areas demonstrate that the proposed surface correlation-based fingerprinting method has improved performance compared to the other conventional methods, thus proving to be a useful complementary method to the GNSS in urban areas.