Rehabilitation Neuroscience Laboratory, University of Victoria, PO Box 3010 STN CSC, Victoria, BC, V8W 3P1, Canada.
Human Discovery Science, International Collaboration on Repair Discoveries (ICORD), Vancouver, BC, Canada.
Exp Brain Res. 2019 Dec;237(12):3207-3220. doi: 10.1007/s00221-019-05662-4. Epub 2019 Oct 10.
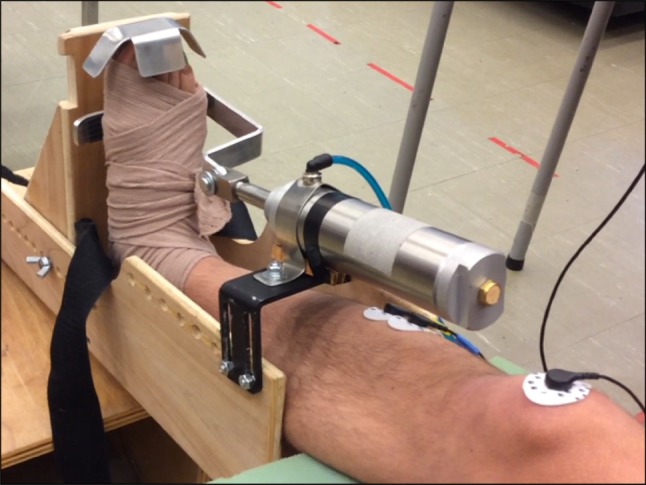
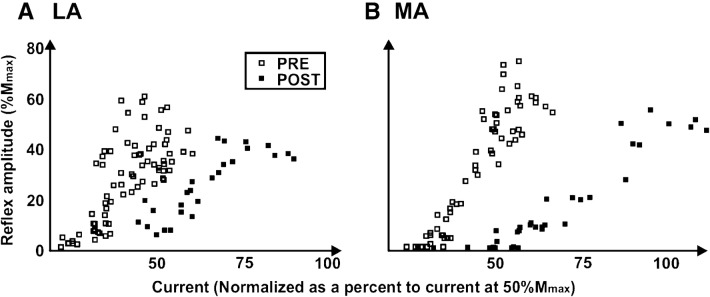
Spasticity of the ankle reduces quality of life by impeding walking and other activities of daily living. Robot-driven continuous passive movement (CPM) is a strategy for lower limb spasticity management but effects on spasticity, walking ability and spinal cord excitability (SCE) are unknown. The objectives of this experiment were to evaluate (1) acute changes in SCE induced by 30 min of CPM at the ankle joint, in individuals without neurological impairment and those with lower limb spasticity; and, (2) the effects of 6 weeks of CPM training on SCE, spasticity and walking ability in those with lower limb spasticity. SCE was assessed using soleus Hoffmann (H-) reflexes, collected prior to and immediately after CPM for acute assessments, whereas a multiple baseline repeated measures design assessed changes following 18 CPM sessions. Spasticity and walking ability were assessed using the Modified Ashworth Scale, the 10 m Walk test, and the Timed Up and Go test. Twenty-one neurologically intact and nine participants with spasticity (various neurological conditions) were recruited. In the neurologically intact group, CPM caused bi-directional modulation of H-reflexes creating 'facilitation' and 'suppression' groups. In contrast, amongst participants with spasticity, acute CPM facilitated H-reflexes. After CPM training, H-reflex excitability on both the more-affected and less-affected sides was reduced; on the more affected side H@Thres, H@50 and H@100 all significantly decreased following CPM training by 96.5 ± 7.7%, 90.9 ± 9.2%, and 62.9 ± 21.1%, respectively. After training there were modest improvements in walking and clinical measures of spasticity for some participants. We conclude that CPM of the ankle can significantly alter SCE. The use of CPM in those with spasticity can provide a temporary period of improved walking, but efficacy of treatment remains unknown.
踝关节痉挛会阻碍行走和其他日常生活活动,从而降低生活质量。机器人驱动的连续被动运动(CPM)是一种管理下肢痉挛的策略,但对痉挛、行走能力和脊髓兴奋性(SCE)的影响尚不清楚。本实验的目的是评估:(1)在无神经损伤个体和下肢痉挛个体中,30 分钟踝关节 CPM 引起的 SCE 的急性变化;以及,(2)6 周 CPM 训练对下肢痉挛个体 SCE、痉挛和行走能力的影响。使用比目鱼肌 H 反射评估 SCE,在 CPM 前后即刻采集以进行急性评估,而使用多基线重复测量设计评估 18 次 CPM 后 SCE 的变化。使用改良 Ashworth 量表、10 米步行测试和计时起立行走测试评估痉挛和行走能力。共招募了 21 名神经正常个体和 9 名下肢痉挛个体(各种神经状况)。在神经正常组中,CPM 引起 H 反射的双向调制,产生“易化”和“抑制”组。相比之下,在痉挛组中,急性 CPM 易化了 H 反射。CPM 训练后,双侧更受影响和更不受影响的侧 H 反射兴奋性均降低;在更受影响的侧,H@Thres、H@50 和 H@100 在 CPM 训练后分别显著降低了 96.5±7.7%、90.9±9.2%和 62.9±21.1%。训练后,一些参与者的行走和痉挛临床评估指标有适度改善。我们得出结论,CPM 能显著改变 SCE。CPM 可用于痉挛患者,提供短暂的行走改善期,但治疗效果仍不清楚。