Intelligent Systems Lab (LSI), Universidad Carlos III de Madrid, Avnd. Universidad 30, 28911 Leganés, Madrid, Spain.
Sensors (Basel). 2020 Jan 23;20(3):642. doi: 10.3390/s20030642.
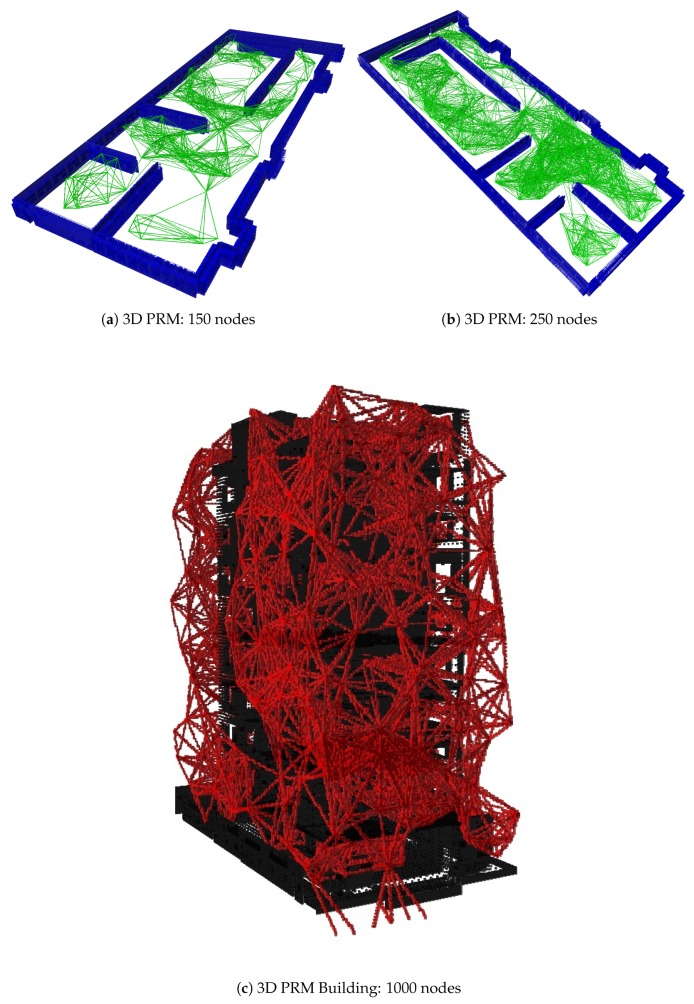
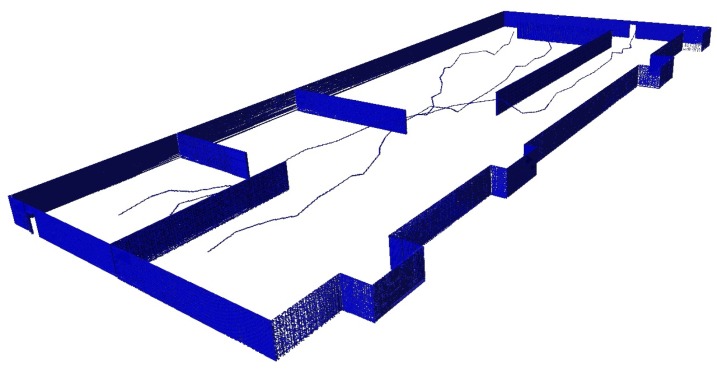
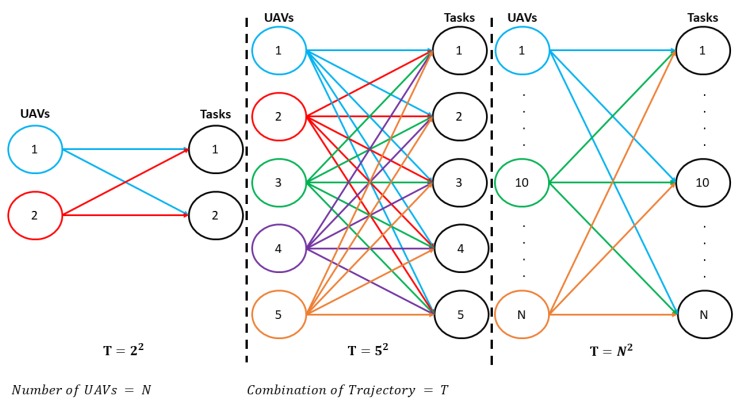
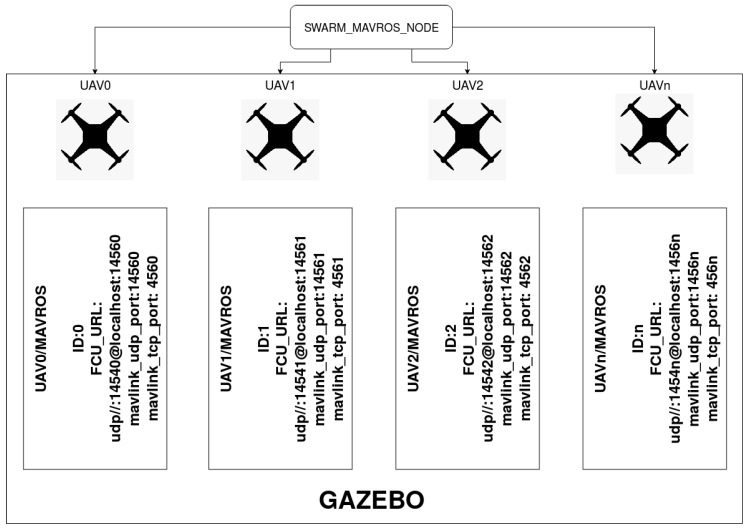
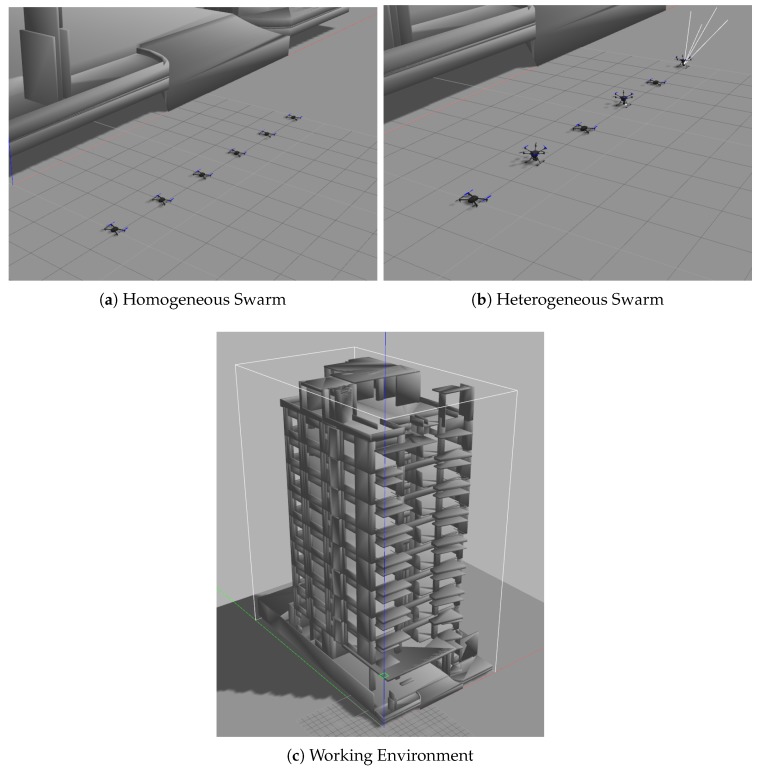
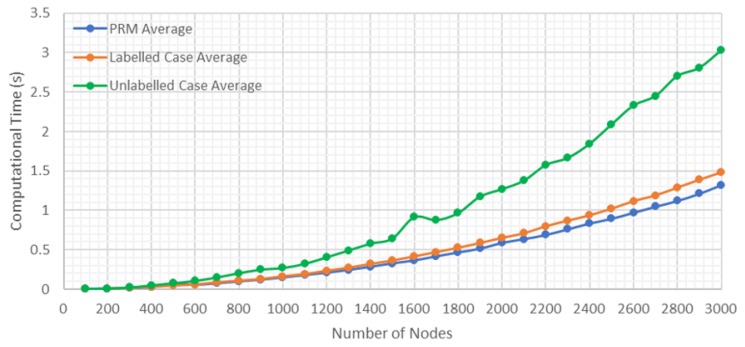
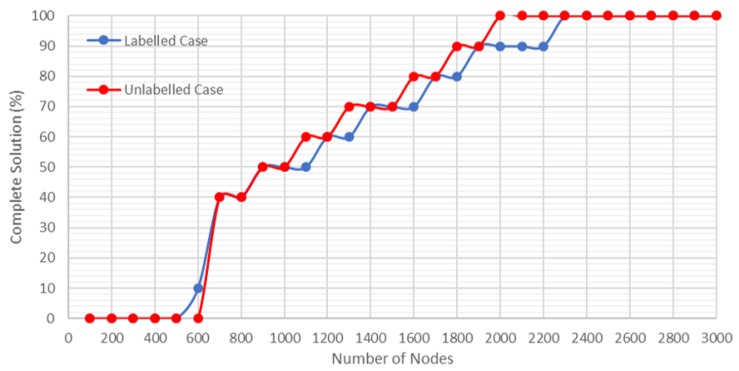
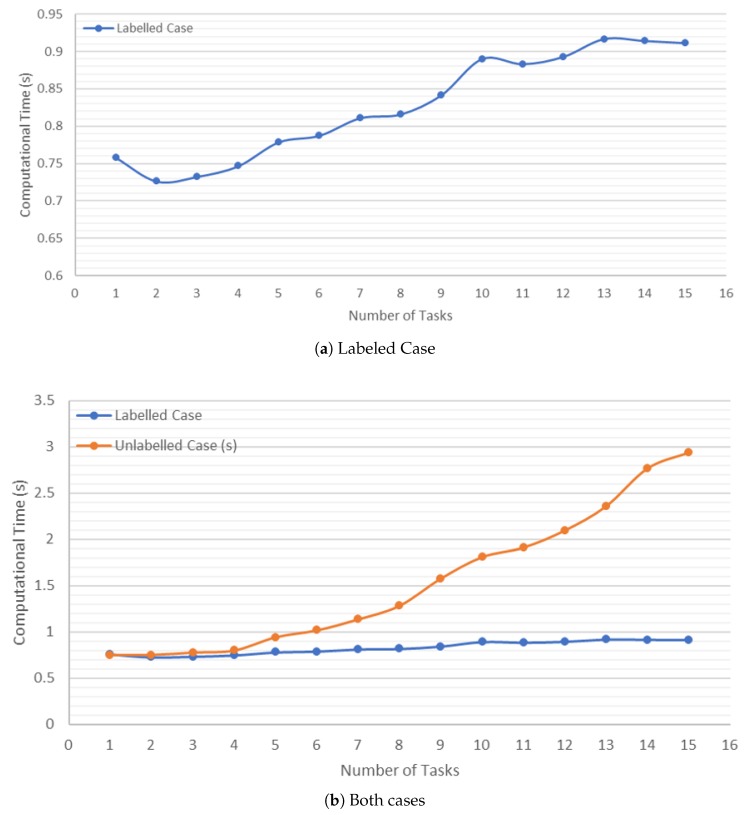
The development in Multi-Robot Systems (MRS) has become one of the most exploited fields of research in robotics in recent years. This is due to the robustness and versatility they present to effectively undertake a set of tasks autonomously. One of the essential elements for several vehicles, in this case, Unmanned Aerial Vehicles (UAVs), to perform tasks autonomously and cooperatively is trajectory planning, which is necessary to guarantee the safe and collision-free movement of the different vehicles. This document includes the planning of multiple trajectories for a swarm of UAVs based on 3D Probabilistic Roadmaps (PRM). This swarm is capable of reaching different locations of interest in different cases (labeled and unlabeled), supporting of an Emergency Response Team (ERT) in emergencies in urban environments. In addition, an architecture based on Robot Operating System (ROS) is presented to allow the simulation and integration of the methods developed in a UAV swarm. This architecture allows the communications with the MavLink protocol and control via the Pixhawk autopilot, for a quick and easy implementation in real UAVs. The proposed method was validated by experiments simulating building emergences. Finally, the obtained results show that methods based on probability roadmaps create effective solutions in terms of calculation time in the case of scalable systems in different situations along with their integration into a versatile framework such as ROS.
多机器人系统(MRS)的发展近年来已成为机器人学中最具研究价值的领域之一。这是由于它们具有强大的鲁棒性和多功能性,能够自主有效地完成一组任务。对于多辆车辆(在这种情况下是无人驾驶飞行器 (UAV))来说,自主和协作执行任务的一个基本要素是轨迹规划,这是确保不同车辆安全无碰撞移动的必要条件。
本文包括基于三维概率路线图 (PRM) 的 UAV 群的多条轨迹规划。该群能够在不同情况下(标记和未标记)到达不同感兴趣的位置,为城市环境中的应急响应团队 (ERT) 提供支持。此外,还提出了一种基于机器人操作系统 (ROS) 的架构,以允许在 UAV 群中模拟和集成开发的方法。该架构允许与 MavLink 协议进行通信,并通过 Pixhawk 自动驾驶仪进行控制,以便在真实的 UAV 中快速轻松地实现。
所提出的方法通过模拟建筑物紧急情况的实验进行了验证。最后,所得结果表明,基于概率路线图的方法在可扩展系统的情况下,在不同情况下的计算时间方面会创建有效的解决方案,并且可以将其集成到 ROS 等通用框架中。