Systems Engineering Research Institute, China State Shipbuilding Corporation, Beijing 100094, China.
Delft Center for Systems and Control, Delft University of Technology, 2626CD Delft, The Netherlands.
Sensors (Basel). 2020 Feb 19;20(4):1136. doi: 10.3390/s20041136.
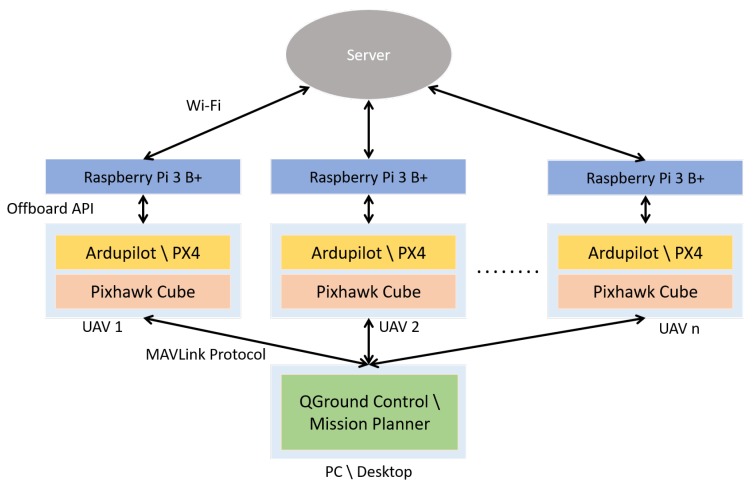
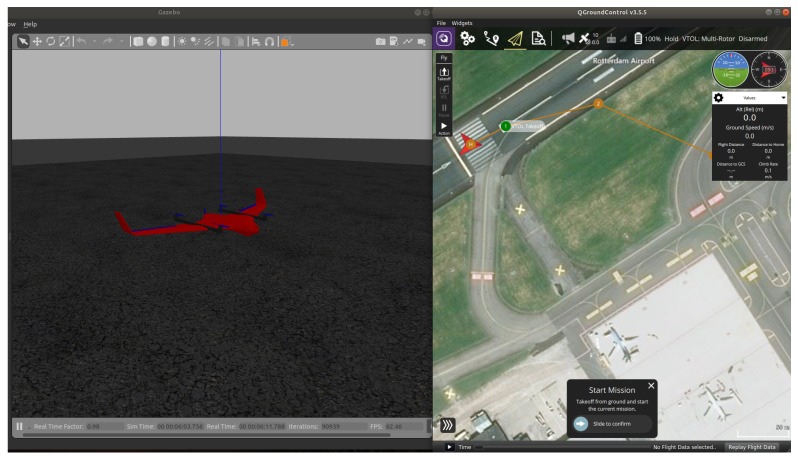
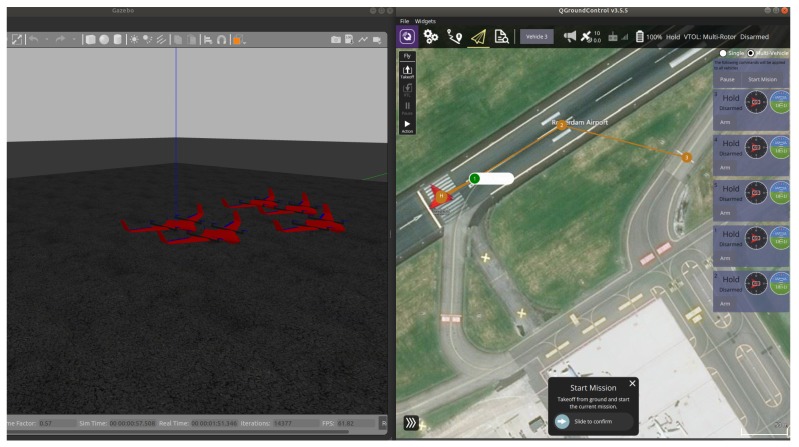
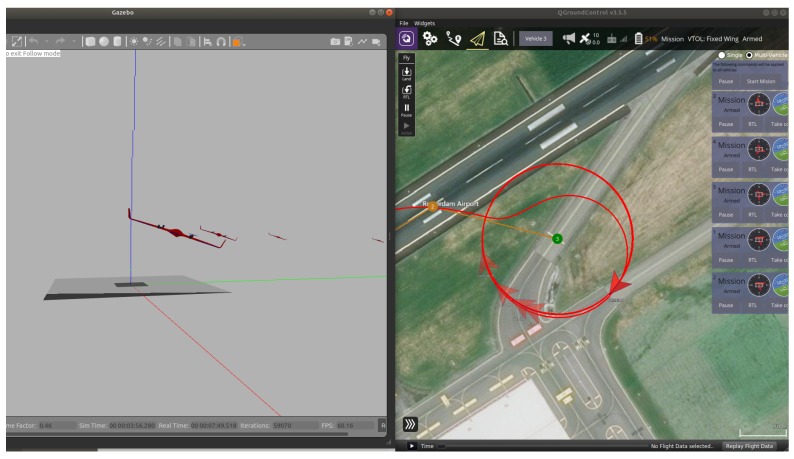
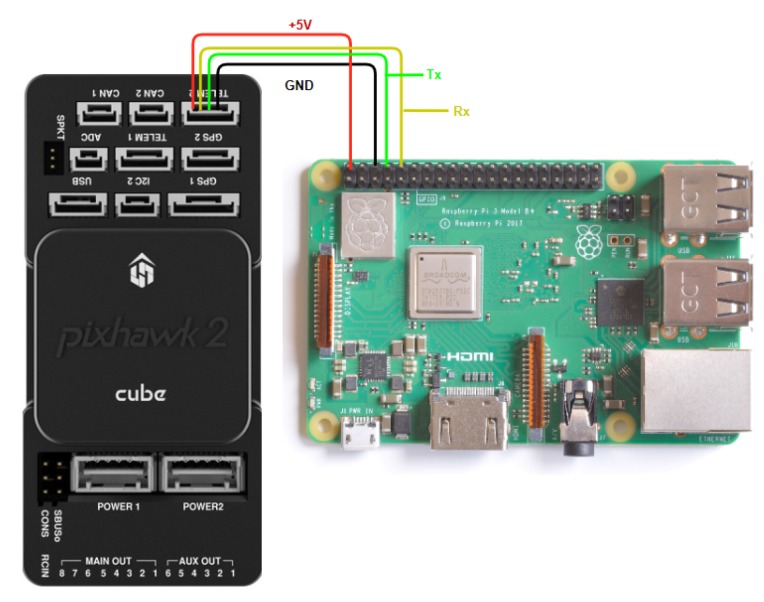
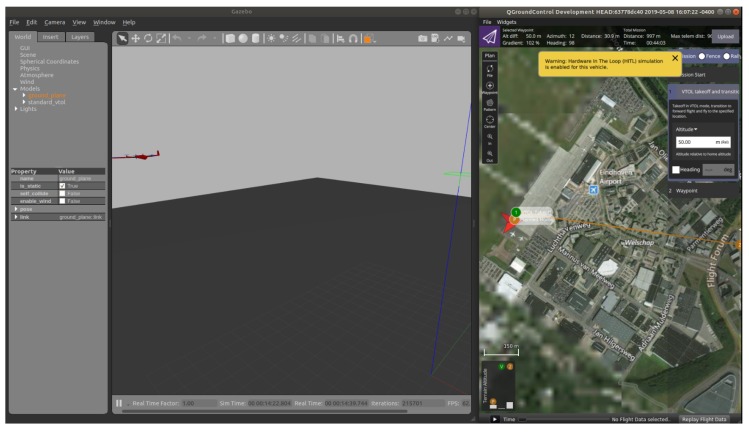
Unmanned Aerial Vehicles (UAVs) have multi-domain applications, fixed-wing UAVs being a widely used class. Despite the ongoing research on the topics of guidance and formation control of fixed-wing UAVs, little progress is known on implementation of semi-physical validation platforms (software-in-the-loop or hardware-in-the-loop) for such complex autonomous systems. A semi-physical simulation platform should capture not only the physical aspects of UAV dynamics, but also the cybernetics aspects such as the autopilot and the communication layers connecting the different components. Such a cyber-physical integration would allow validation of guidance and formation control algorithms in the presence of uncertainties, unmodelled dynamics, low-level control loops, communication protocols and unreliable communication: These aspects are often neglected in the design of guidance and formation control laws for fixed-wing UAVs. This paper describes the development of a semi-physical platform for multi-fixed wing UAVs where all the aforementioned points are carefully integrated. The environment adopts Raspberry Pi's programmed in C++, which can be interfaced to standard autopilots (PX4) as a companion computer. Simulations are done in a distributed setting with a server program designed for the purpose of routing data between nodes, handling the user inputs and configurations of the UAVs. Gazebo-ROS is used as a 3D visualization tool.
无人飞行器(UAV)在多个领域都有应用,固定翼 UAV 是一种广泛使用的类型。尽管在固定翼 UAV 的制导和编队控制方面的研究一直在进行,但对于这种复杂的自主系统,很少有关于半物理验证平台(软件在环或硬件在环)的实施进展。半物理仿真平台不仅应捕获 UAV 动力学的物理方面,还应捕获诸如自动驾驶仪和连接不同组件的通信层等控制论方面。这种网络物理集成将允许在存在不确定性、未建模动力学、低级控制回路、通信协议和不可靠通信的情况下验证制导和编队控制算法:这些方面在固定翼 UAV 的制导和编队控制律设计中经常被忽略。本文介绍了一种多固定翼 UAV 的半物理平台的开发,其中仔细集成了所有上述要点。该环境采用 C++编程的 Raspberry Pi,可以作为伴生计算机与标准自动驾驶仪(PX4)接口。模拟在分布式设置中进行,服务器程序专为在节点之间路由数据、处理用户输入和配置 UAV 而设计。Gazebo-ROS 用作 3D 可视化工具。