Sandhu Shaktee, Gulrez Tauseef, Mansell Warren
CeNTrUM (Centre for New Treatments and Understanding in Mental Health), Division of Psychology and Mental Health, School of Health Sciences, Faculty of Biology Medicine and Health, University of Manchester, Manchester Academic Health Science Centre, 2nd Floor Zochonis Building, Brunswick Street, Manchester, M13 9PL, UK.
School of Computing, Science and Engineering, Salford Innovation Research Centre (SIRC), Autonomous Systems and Robotics, University of Salford, Salford, M5 4WT, UK.
Atten Percept Psychophys. 2020 Aug;82(6):3112-3123. doi: 10.3758/s13414-020-02016-z.
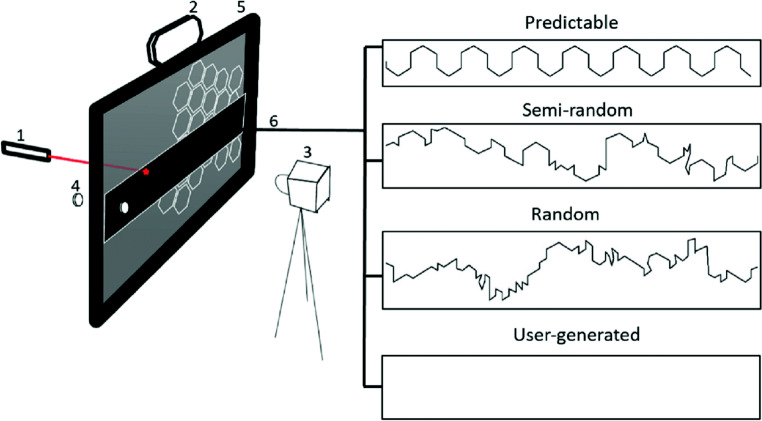
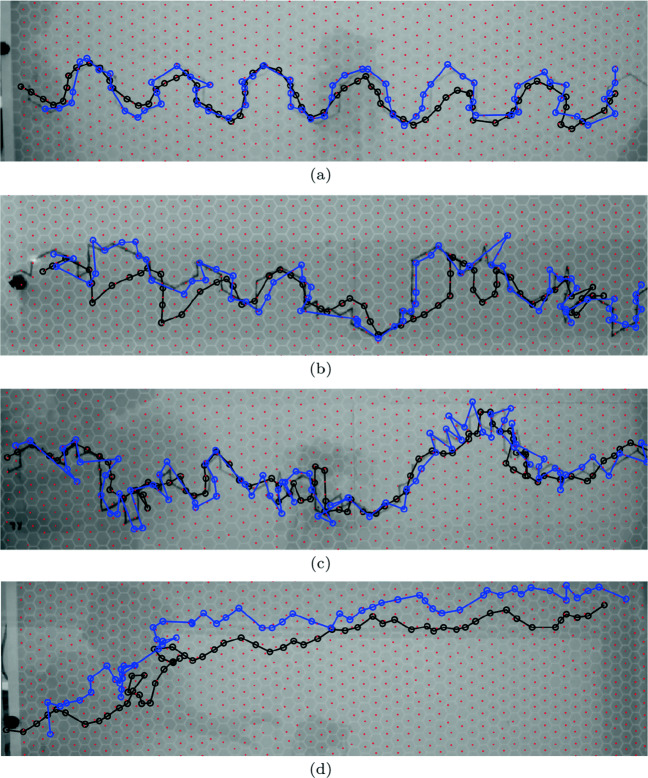
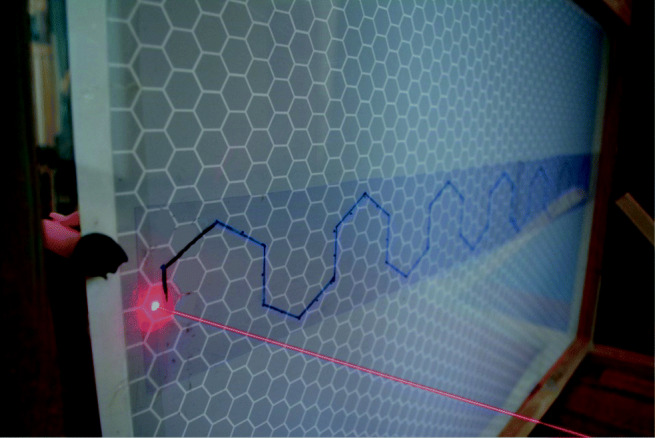
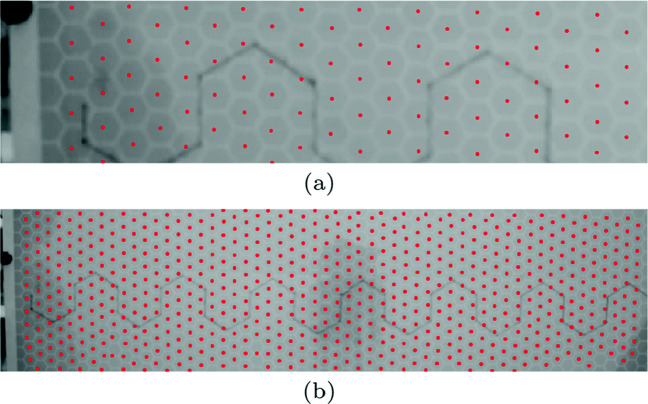
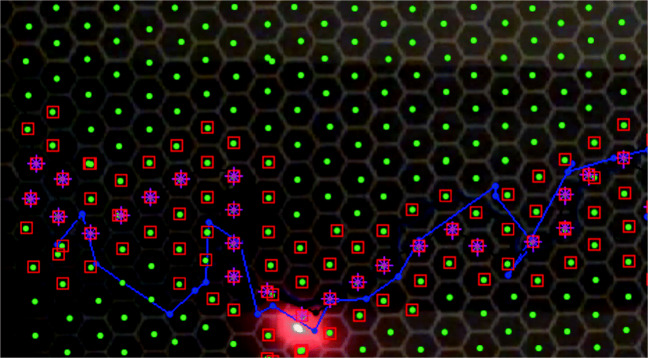
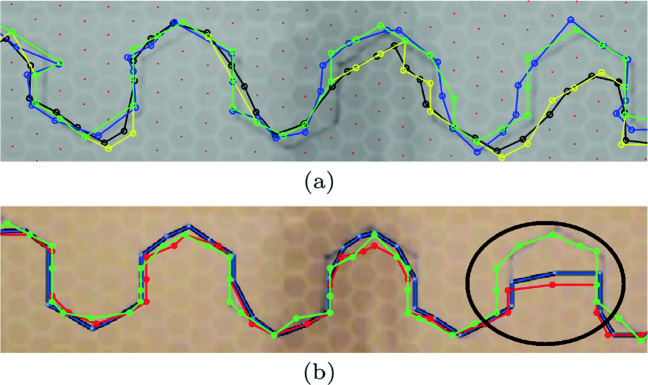
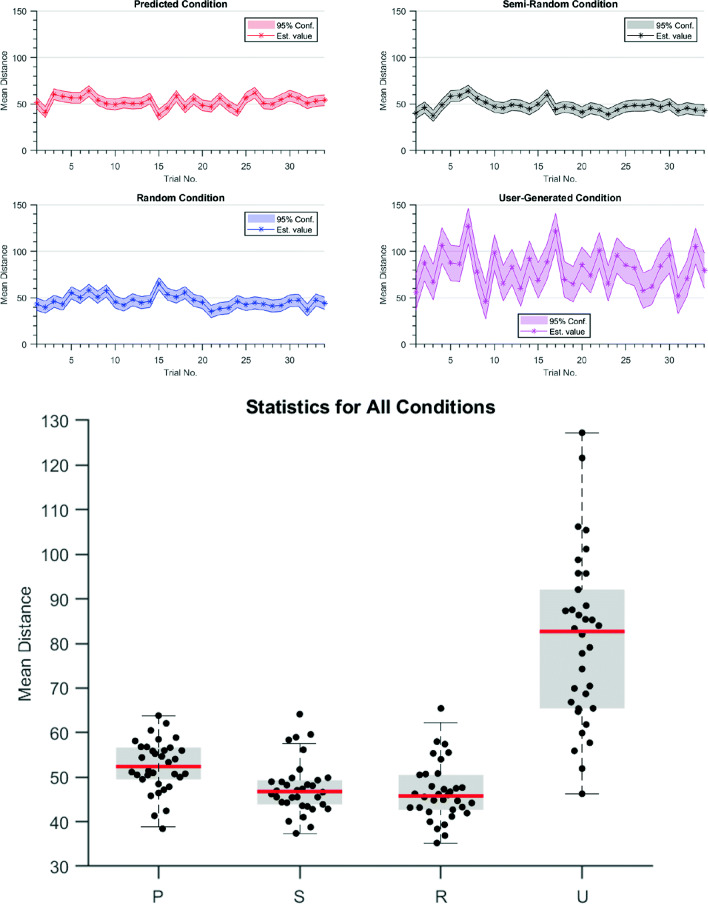
It is commonly thought that the mind constructs predictive models of the environment to plan an appropriate behavioral response. Therefore a more predictable environment should entail better performance, and prey should move in an unpredictable (random) manner to evade capture, known as protean motion. To test this, we created a novel experimental design and analysis in which human participants took the role of predator or prey. The predator was set the task of capturing the prey, while the prey was set the task of escaping. Participants performed this task standing on separate sides of a board and controlling a marker representing them. In three conditions, the prey followed a pattern of movement with varying predictability (predictable, semi-random, and random) and in one condition moved autonomously (user generated). The user-generated condition illustrated a naturalistic, dynamic environment involving a purposeful agent whose degree of predictability was not known in advance. The average distance between participants was measured through a video analysis custom-built in MATLAB. The user-generated condition had the largest average distance. This indicated that, rather than moving randomly (protean motion), humans may naturally employ a cybernetic escape strategy that dynamically maximizes perceived distance, regardless of the predictability of this strategy.
人们普遍认为,大脑构建环境的预测模型以规划适当的行为反应。因此,一个更可预测的环境应该带来更好的表现,而猎物应该以不可预测(随机)的方式移动以逃避捕获,这被称为多变运动。为了验证这一点,我们创建了一种新颖的实验设计和分析方法,其中人类参与者扮演捕食者或猎物的角色。给捕食者设定捕获猎物的任务,同时给猎物设定逃脱的任务。参与者站在一块板子的两侧执行这项任务,并控制代表他们的一个标记。在三种情况下,猎物遵循具有不同可预测性的运动模式(可预测、半随机和随机),在一种情况下自主移动(用户生成)。用户生成的情况展示了一个自然主义的动态环境,其中涉及一个有目的的主体,其可预测程度事先未知。通过在MATLAB中定制构建的视频分析来测量参与者之间的平均距离。用户生成的情况下平均距离最大。这表明,人类可能并非随机移动(多变运动),而是自然地采用一种控制论的逃脱策略,即动态地最大化感知距离,而不管这种策略的可预测性如何。