Department Population Health Sciences, Faculty of Veterinary Medicine, Utrecht University, Utrecht, The Netherlands.
Department of Anatomy, Physiology and Biochemistry, Swedish University of Agricultural Sciences, Uppsala, Sweden.
PLoS One. 2020 Jun 3;15(6):e0233266. doi: 10.1371/journal.pone.0233266. eCollection 2020.
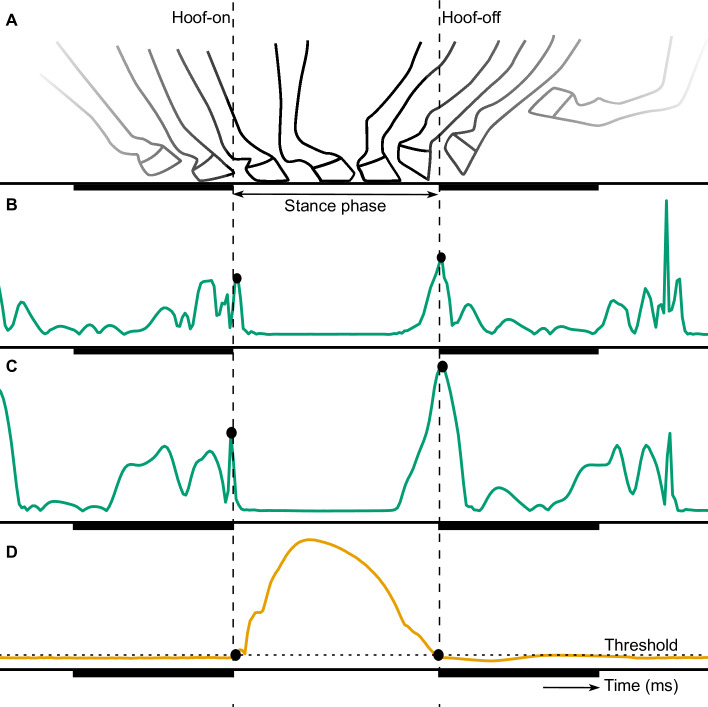
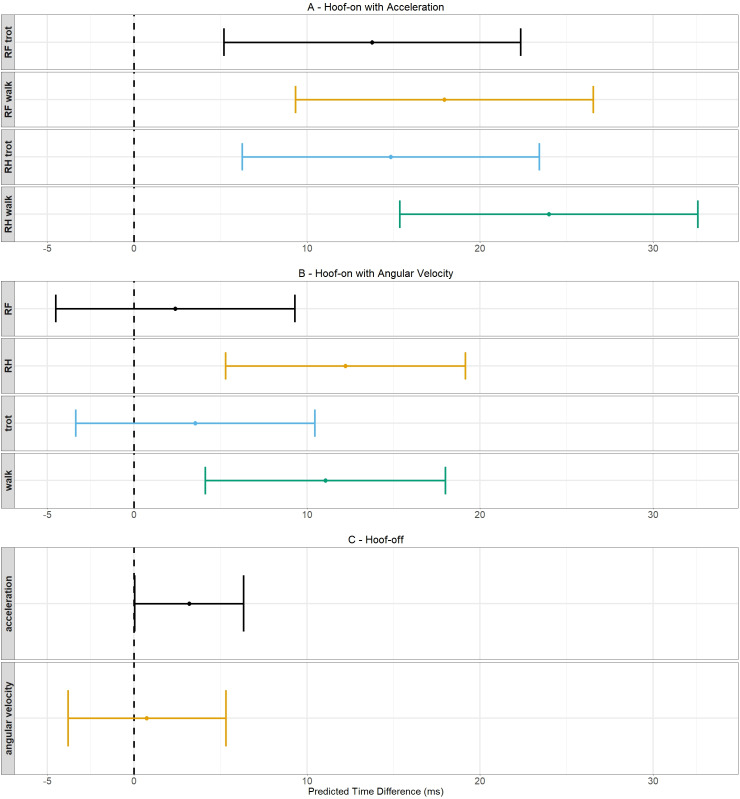
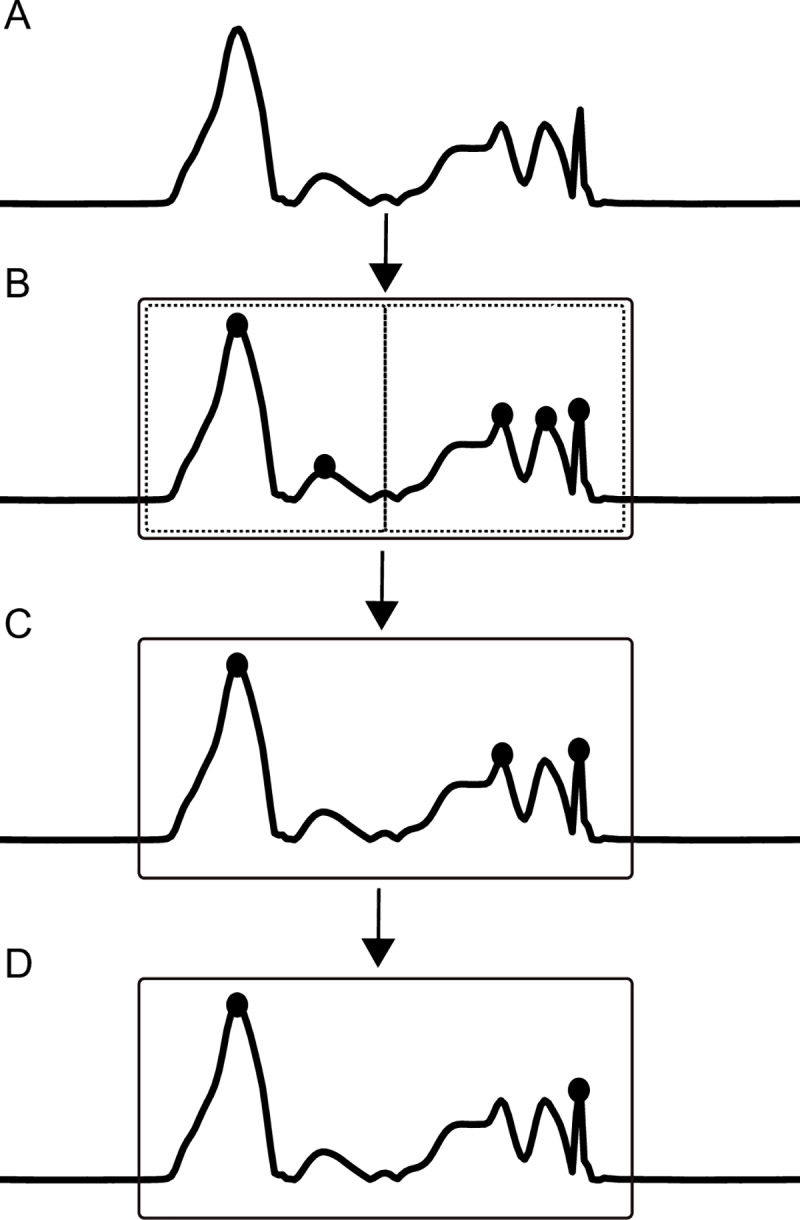
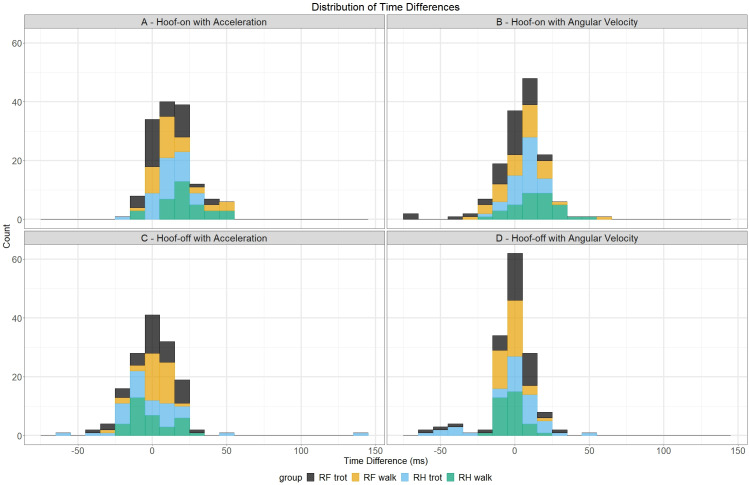
For gait classification, hoof-on and hoof-off events are fundamental locomotion characteristics of interest. These events can be measured with inertial measurement units (IMUs) which measure the acceleration and angular velocity in three directions. The aim of this study was to present two algorithms for automatic detection of hoof-events from the acceleration and angular velocity signals measured by hoof-mounted IMUs in walk and trot on a hard surface. Seven Warmblood horses were equipped with two wireless IMUs, which were attached to the lateral wall of the right front (RF) and hind (RH) hooves. Horses were walked and trotted on a lead over a force plate for internal validation. The agreement between the algorithms for the acceleration and angular velocity signals with the force plate was evaluated by Bland Altman analysis and linear mixed model analysis. These analyses were performed for both hoof-on and hoof-off detection and for both algorithms separately. For the hoof-on detection, the angular velocity algorithm was the most accurate with an accuracy between 2.39 and 12.22 ms and a precision of around 13.80 ms, depending on gait and hoof. For hoof-off detection, the acceleration algorithm was the most accurate with an accuracy of 3.20 ms and precision of 6.39 ms, independent of gait and hoof. These algorithms look highly promising for gait classification purposes although the applicability of these algorithms should be investigated under different circumstances, such as different surfaces and different hoof trimming conditions.
对于步态分类,蹄着地和蹄离地事件是感兴趣的基本运动特征。这些事件可以通过测量三个方向的加速度和角速度的惯性测量单元 (IMU) 来测量。本研究的目的是提出两种算法,用于自动检测在坚硬表面上行走和小跑时从安装在马蹄上的 IMU 测量的加速度和角速度信号中的蹄事件。七匹温血马配备了两个无线 IMU,分别安装在右前 (RF) 和后 (RH) 蹄的侧壁上。马在力板上被引导行走和小跑,用于内部验证。通过 Bland Altman 分析和线性混合模型分析评估了算法与力板之间的加速度和角速度信号的一致性。这些分析分别针对蹄着地和蹄离地检测以及两个算法进行。对于蹄着地检测,角速度算法最准确,精度在 2.39 和 12.22 毫秒之间,精度约为 13.80 毫秒,具体取决于步态和蹄。对于蹄离地检测,加速度算法最准确,精度为 3.20 毫秒,精度为 6.39 毫秒,与步态和蹄无关。这些算法对于步态分类目的看起来非常有前途,尽管应该在不同的情况下(例如不同的表面和不同的蹄修剪条件)研究这些算法的适用性。