Division of Electronics and Electrical Engineering, Dongguk University, 30 Pildong-ro 1-gil, Jung-gu, Seoul 04620, Korea.
Sensors (Basel). 2020 Jul 14;20(14):3918. doi: 10.3390/s20143918.
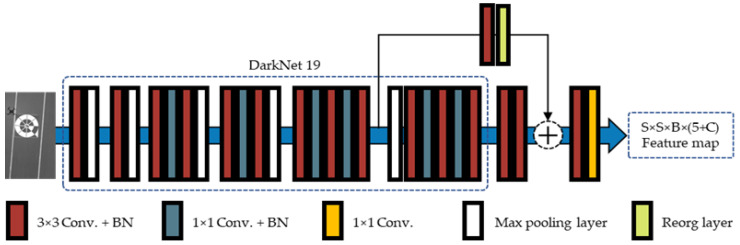
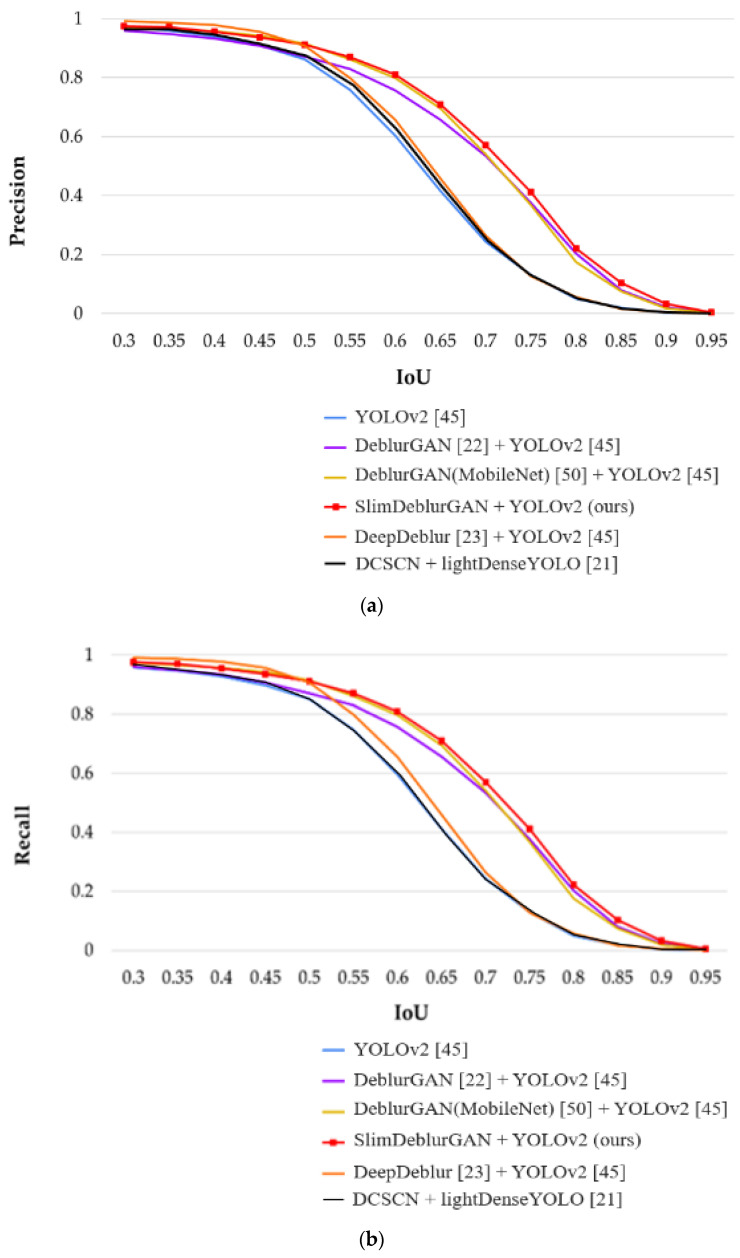
Deep learning-based marker detection for autonomous drone landing is widely studied, due to its superior detection performance. However, no study was reported to address non-uniform motion-blurred input images, and most of the previous handcrafted and deep learning-based methods failed to operate with these challenging inputs. To solve this problem, we propose a deep learning-based marker detection method for autonomous drone landing, by (1) introducing a two-phase framework of deblurring and object detection, by adopting a slimmed version of deblur generative adversarial network (DeblurGAN) model and a You only look once version 2 (YOLOv2) detector, respectively, and (2) considering the balance between the processing time and accuracy of the system. To this end, we propose a channel-pruning framework for slimming the DeblurGAN model called SlimDeblurGAN, without significant accuracy degradation. The experimental results on the two datasets showed that our proposed method exhibited higher performance and greater robustness than the previous methods, in both deburring and marker detection.
基于深度学习的自主无人机着陆标记检测由于其优越的检测性能而得到广泛研究。然而,目前尚无研究报道解决非均匀运动模糊输入图像的问题,并且以前的大多数基于手工制作和深度学习的方法都无法处理这些具有挑战性的输入。为了解决这个问题,我们提出了一种基于深度学习的自主无人机着陆标记检测方法,通过(1)引入去模糊和目标检测的两阶段框架,分别采用瘦身版的去模糊生成对抗网络(DeblurGAN)模型和 You only look once 版本 2(YOLOv2)检测器,以及(2)考虑系统处理时间和准确性之间的平衡。为此,我们提出了一种用于瘦身 DeblurGAN 模型的通道修剪框架,称为 SlimDeblurGAN,而不会显著降低准确性。在两个数据集上的实验结果表明,与以前的方法相比,我们提出的方法在去模糊和标记检测方面都表现出了更高的性能和更强的鲁棒性。